Режим работы «Супер-событие»#
В CARS Analytics доступен режим работы «Супер-событие», который необходим для создания событий детекции и распознавания атрибутов ТС и ГРЗ с агрегированными данными из нескольких видеопотоков.
Обратите внимание, после включения режима «Супер-событие» классический режим работы LUNA CARS Analytics будет недоступен!
Включение режима «Супер-событие»#
После установки LUNA CARS (см. документацию LUNA CARS Installer Руководство по установке) по умолчанию режим работы «Супер-событие» деактивирован. Для работы с ним необходимо включить его, для этого:
1․ Перейдите в рабочую директорию:
cd cars-installer_v.*.*.*/
2․ Убедитесь что контейнеры Docker выключены:
docker ps
В списке не должно быть контейнеров системы LUNA CARS
3․ Если в списке есть контейнеры системы LUNA CARS, выполните скрипт в рабочем каталоге для их остановки:
./docker_stop_all.sh
Дождитесь остановки всех контейнеров Docker
4․ Откройте в редакторе конфигурационный файл «.env»:
nano .env
5․ Установите следующие значения для переменных:
ANALYTICS_AGGREGAROR_CMD=start_checkpoint_aggregator
ANALYTICS_PLUGIN_NAME=checkpoint_plugin
ANALYTICS_CHECKPOINT_MODE=True
6․ Сохраните и закройте файл «.env» (в редакторе nano: Ctr+X → Y → Enter)
7․ Выполните команду для очистки файла миграции:
rm /var/lib/luna/cars/docker/volumes/media/db_check/*-v.X.X.XX-vX.X.XX
Где v.X.X.XX-vX.X.XX часть значения переменной ANALYTICS_BACKEND_VERSION, указанная в конфигурационном файле «.env»:
ANALYTICS_BACKEND_VERSION=42302e6-v.3.1.21-v1.0.27
8․ Запустите Docker контейнеры:
./docker_start_all.sh
9․ Откройте веб интерфейс LUNA CARS Analytics по следующему адресу:
http://ip_address:8080
Порт настраивается в переменной
ANALYTICS_FRONTEND_PORTв конфигурационном файле «.env», значение по умолчанию "8080"
Выключение режима «Супер-событие»#
На данный момент выключение режима «Супер-событие» не предусмотрено. Для работы LUNA CARS Analytics в классическом режиме требуется переустановка системы (см. документацию LUNA CARS Installer Руководство по установке).
Доступные обработчики#
Для формирования событий детекции и распознавания должны быть заданы обработчики, подробнее см. в разделе «Сценарии»
Режим работы «Супер-событие» состоит из одного обязательного обработчика(Front tracking) и одного (и более) дополнительных.
В режиме работы «Супер-событие» доступны следующие обработчики:
Таблица 42. Описание обработчиков в составе «Супер-событие»
| Обработчик | Назначение | Описание | Камера |
|---|---|---|---|
| Front tracking | Формирует вид ТС спереди, распознает ГРЗ спереди | Обязательный обработчик. Допускается 1 экземпляр | RTSP поток |
| Back tracking | Формирует вид ТС сзади, распознает ГРЗ сзади | Не обязательный обработчик. Допускается множество экземпляров | RTSP поток |
| Back crawler | Формирует вид ТС сзади, необходим для уточнения параметров распознавания с других ракурсов | Не обязательный обработчик. Допускается множество экземпляров | ANPR камера |
| Side crawler | Формирует вид ТС сбоку, определяет количество осей ТС | Не обязательный обработчик. Допускается множество экземпляров | ANPR камера |
Обработчик «Front tracking»#
Параметры обработчика приведены в Таблице 43.
Таблица 43. Параметры обработчика «Front tracking»
| Название | Описание | Возможные значения | Значение по умолчанию |
|---|---|---|---|
| Камера | Источник кадров видеопотока | Камеры, добавленные в системе | - |
| Область для пересечения | Выпадающий список для выбора зоны, с которой проверяется пересечение ТС для работы сценария | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Создание и редактирование зоны распознавания | - |
| Минимальный порог пересечения | Относительная площадь «Области для пересечения», перекрытая BBox ТС, при превышении порога которой будет сформировано событие. Чем выше порог, тем точнее будет детекция ТС и ГРЗ, но количество пропусков также увеличится. Не рекомендуется вводить больше двух знаков после запятой | 0,01…1,00 | - |
| - 0,01 – событие формируется, когда BBox пересекает «Область для пересечения» | |||
| - 1,00 – событие формируется только при полном нахождении Bbox в «Области для пересечения» | |||
| Количество бестшотов | Минимальное количество кадров текущего трека для выбора лучшего кадра. Если в треке будет меньше кадров, чем указанный минимум в данном параметре, то лучший кадр будет выбран, но вероятность корректного распознавания всех атрибутов и символов ГРЗ ниже. Чем больше будет собрано кадров для выборки лучшего, тем точнее будет распознавание атрибутов ТС. Увеличение количества кадров может привести к уменьшению производительности | 1…10 | 1 |
| - 1 – высокая вероятность получения неверных результатов распознавания | |||
| - 10 – время выбора лучшего кадра увеличивается, но качество выше | |||
| Максимальное количество бестшотов | Максимально количество лучших кадров для одного трека. При достижении максимум выбор лучших кадров завершается. Значение данного параметра должно быть больше или равно значению параметра «Количество бестшотов» | 1…1000000 | 43200 |
| - 1 – высокая вероятность получения неверных результатов распознавания из-за низкого качества лучшего кадра | |||
| - 100 – время выбора лучшего кадра увеличивается, но качество выше | |||
| Задержка отправки первого бестшота | Пауза между началом трека и отправкой первого кадра в CARS Stream для определения лучшего кадра. Необходимо увеличивать паузу, если ТС в первые секунды трека может быть не в оптимальном ракурсе | 0…1000 | 0 |
| - 0 – нет задержки | |||
| - 1…1000 – пауза в миллисекундах | |||
| Периодичность отправки бестшотов | Пауза между отправкой кадров трека для определения лучшего кадра. Необходимо увеличивать паузу, чтобы ТС на кадрах трека было детектировано в разных ракурсах с целью повышения качества детекции. Набор из нескольких лучших кадров трека позволит повысить вероятность выбора качественного лучшего кадра | 1000…1000000 | 2000 |
| - 0 – нет задержки | |||
| - 1…2000 – пауза в миллисекундах | |||
| Первая контрольная зона | Зона детекции, с помощью которой определяется направление движения ТС | Зоны, добавленные в камере | - |
| Вторая контрольная зона | Зона детекции, с помощью которой определяется направление движения ТС | Зоны, добавленные в камере | - |
| Использовать область движения | Использование дополнительной области детекции для работы с частью дороги (полоса движения, въезд/выезд, остановка и т.д.). Формирование списка лучших кадров будет только для ТС, BBox которых перекрывает область движения с заданным порогом | On/Off | Off |
| Область движения | Зона детекции, с которой проверяется пересечения ТС. Введение дополнительной зоны позволит отсекать события, которые не требуется фиксировать | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Создание и редактирование зоны распознавания | - |
| Порог области движения | Относительная площадь зоны детекции, перекрытая BBox ТС, при превышении порога которой будут учитываться ТС для формирования лучших кадров. Не рекомендуется вводить больше двух знаков после запятой | 0,01…1,00 | 0,25 |
| - 0,01 – событие формируется сразу при появлении BBox ТС в области движения | |||
| - 1,00 – событие формируется только при полном нахождении Bbox в зоне области движения |
Обработчик «Back tracking»#
Параметры обработчика приведены в Таблице 44.
Таблица 44. Параметры обработчика «Back tracking»
| Название | Описание | Возможные значения | Значение по умолчанию |
|---|---|---|---|
| Камера | Источник кадров видеопотока | Камеры, добавленные в системе | - |
| Область для пересечения | Выпадающий список для выбора зоны, с которой проверяется пересечение ТС для работы сценария | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Создание и редактирование зоны распознавания | - |
| Минимальный порог пересечения | Относительная площадь «Области для пересечения», перекрытая BBox ТС, при превышении порога которой будет сформировано событие. Чем выше порог, тем точнее будет детекция ТС и ГРЗ, но количество пропусков также увеличится. Не рекомендуется вводить больше двух знаков после запятой | 0,01…1,00 | - |
| - 0,01 – событие формируется, когда BBox пересекает «Область для пересечения» | |||
| - 1,00 – событие формируется только при полном нахождении Bbox в «Области для пересечения» | |||
| Количество бестшотов | Минимальное количество кадров текущего трека для выбора лучшего кадра. Если в треке будет меньше кадров, чем указанный минимум в данном параметре, то лучший кадр будет выбран, но вероятность корректного распознавания всех атрибутов и символов ГРЗ ниже. Чем больше будет собрано кадров для выборки лучшего, тем точнее будет распознавание атрибутов ТС. Увеличение количества кадров может привести к уменьшению производительности | 1…1000000 | 1 |
| - 1 – высокая вероятность получения неверных результатов распознавания | |||
| - 10 – время выбора лучшего кадра увеличивается, но качество выше | |||
| Максимальное количество бестшотов | Максимально количество лучших кадров для одного трека. При достижении максимум выбор лучших кадров завершается. Значение данного параметра должно быть больше или равно значению параметра «Количество бестшотов» | 1…1000000 | 2 |
| - 1 – высокая вероятность получения неверных результатов распознавания из-за низкого качества лучшего кадра | |||
| - 100 – время выбора лучшего кадра увеличивается, но качество выше | |||
| Периодичность отправки бестшотов | Пауза между отправкой кадров трека для определения лучшего кадра. Необходимо увеличивать паузу, чтобы ТС на кадрах трека было детектировано в разных ракурсах с целью повышения качества детекции. Набор из нескольких лучших кадров трека позволит повысить вероятность выбора качественного лучшего кадра | 0…2000 | 2000 |
| - 0 – нет задержки | |||
| - 1…2000 – пауза в миллисекундах | |||
| Использовать область движения | Использование дополнительной области детекции для работы с частью дороги (полоса движения, въезд/выезд, остановка и т.д.). Формирование списка лучших кадров будет только для ТС, BBox которых перекрывает область движения с заданным порогом | On/Off | Off |
| Область движения | Зона детекции, с которой проверяется пересечения ТС. Введение дополнительной зоны позволит отсекать события, которые не требуется фиксировать | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Создание и редактирование зоны распознавания | - |
| Порог области движения | Относительная площадь зоны детекции, перекрытая BBox ТС, при превышении порога которой будут учитываться ТС для формирования лучших кадров. Не рекомендуется вводить больше двух знаков после запятой | 0,01…1,00 | 0,25 |
| - 0,01 – событие формируется сразу при появлении BBox ТС в области движения | |||
| - 1,00 – событие формируется только при полном нахождении Bbox в зоне области движения |
Обработчик «Back crawler»#
Параметры обработчика приведены в Таблице 45.
Таблица 45. Параметры обработчика «Back crawler»
| Название | Описание | Возможные значения | Значение по умолчанию |
|---|---|---|---|
| Камера | Источник кадров видеопотока | Камеры, добавленные в системе | - |
| Область для пересечения | Выпадающий список для выбора зоны, с которой проверяется пересечение ТС для работы сценария | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Создание и редактирование зоны распознавания | - |
| Минимальный порог пересечения | Относительная площадь «Области для пересечения», перекрытая BBox ТС, при превышении порога которой будет сформировано событие. Чем выше порог, тем точнее будет детекция ТС и ГРЗ, но количество пропусков также увеличится. Не рекомендуется вводить больше двух знаков после запятой | 0,01…1,00 | - |
Обработчик «Side crawler»#
Параметры обработчика приведены в Таблице 46.
Таблица 46. Параметры обработчика «Side crawler»
| Название | Описание | Возможные значения | Значение по умолчанию |
|---|---|---|---|
| Камера | Источник кадров видеопотока | Камеры, добавленные в системе | - |
| Область для пересечения | Выпадающий список для выбора зоны, с которой проверяется пересечение ТС для работы сценария | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Создание и редактирование зоны распознавания | - |
| Минимальный порог пересечения | Относительная площадь «Области для пересечения», перекрытая BBox ТС, при превышении порога которой будет сформировано событие. Чем выше порог, тем точнее будет детекция ТС и ГРЗ, но количество пропусков также увеличится. Не рекомендуется вводить больше двух знаков после запятой | 0,01…1,00 | - |
Подключение и настройка камер#
Подключение и настройка камер осуществляется в разделе «Камеры», см. подробнее в разделе «Камеры»
Для корректной работы режима «Супер-событие» необходимо подключить одну обязательную Front tracking камеру и N - дополнительных камер расположенных на целевом объекте.
Рассмотрим примеры настройки четырех камер для режима работы «Супер-событие».
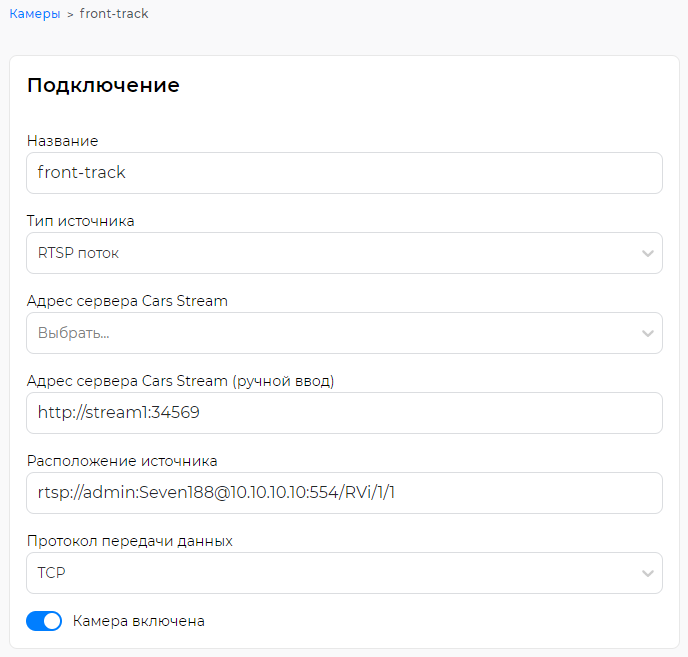
Настройка Front tracking камеры#
Добавьте камеру с типом источника RTSP поток. Параметры подключения камеры (Рисунок 116).
Загрузите превью камеры из файла или из CARS Stream.
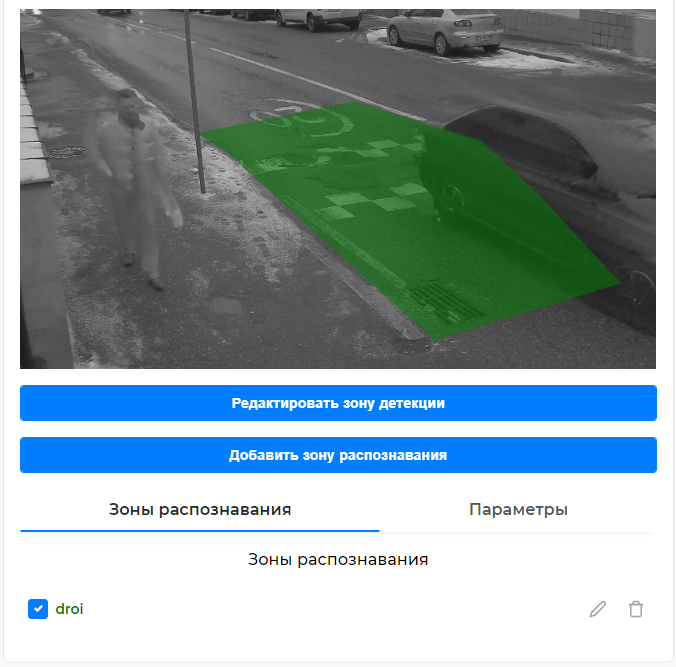
Добавьте 3 зоны распознавания. Настройка зон распознавания (Рисунок 117).

Описание зон распознавания представлено в Таблице 47.
Таблица 47. Описание зон распознавания
| Зона | Описание | Назначение |
|---|---|---|
| droi | Зона распознавания | Основная зона распознавания ТС |
| zoneA | Первая контрольная зона | Определение направления движения ТС |
| zoneB | Вторая контрольная зона | Определение направления движения ТС |
Описание настроек и параметров подключения см. в разделе «Камеры»
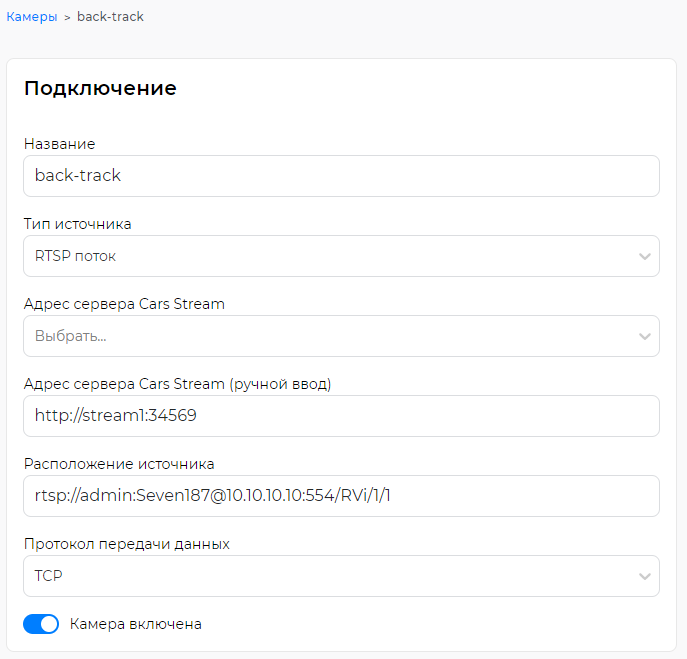
Настройка Back tracking камеры#
Добавьте камеру с типом источника RTSP поток. Параметры подключения камеры (Рисунок 118).
Загрузите превью камеры из файла или из CARS Stream.
Добавьте 2 зоны распознавания. Настройка зон распознавания (Рисунок 119).
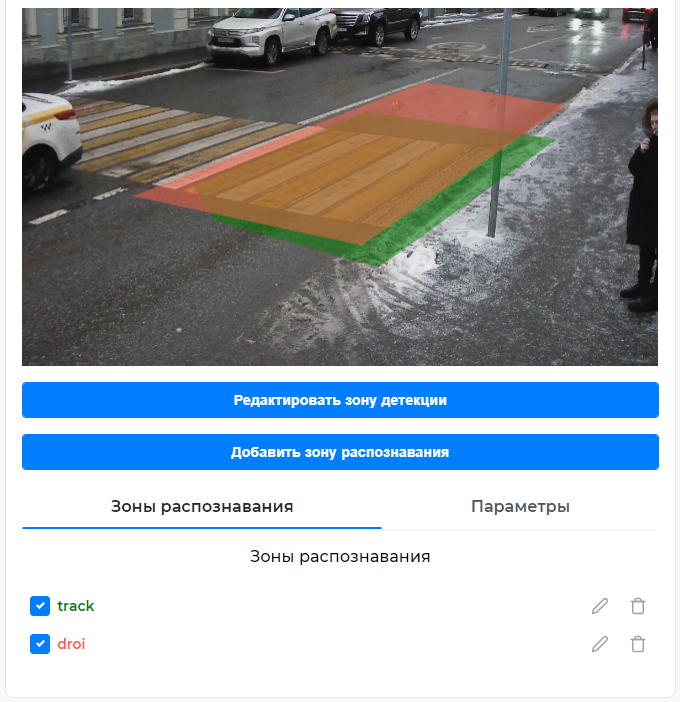
Описание зон распознавания представлено в Таблице 48.
Таблица 48. Описание зон распознавания
| Зона | Описание | Назначение |
|---|---|---|
| droi | Зона распознавания | Основная зона распознавания ТС |
| track | Область движения | Область где отслеживается движение ТС |
Описание настроек и параметров подключения см. в разделе «Камеры»
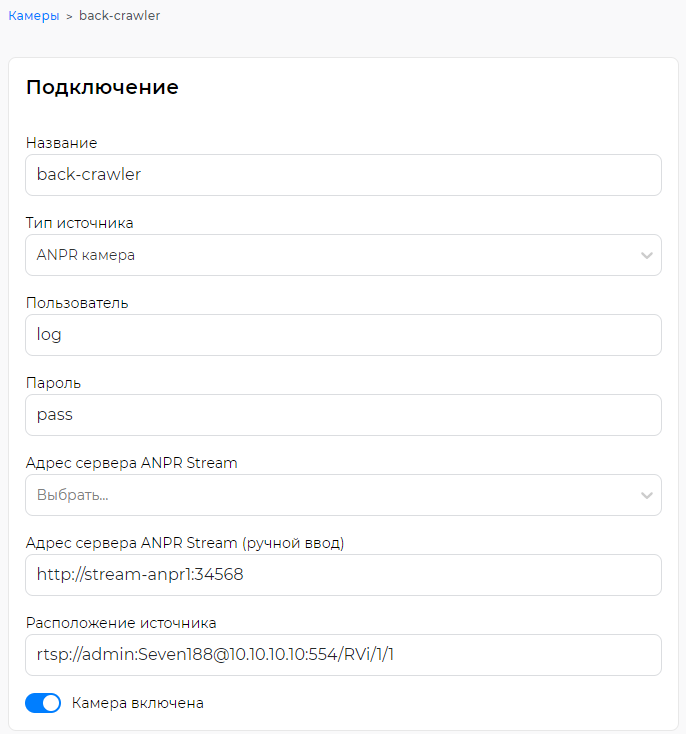
Настройка Back crawler камеры#
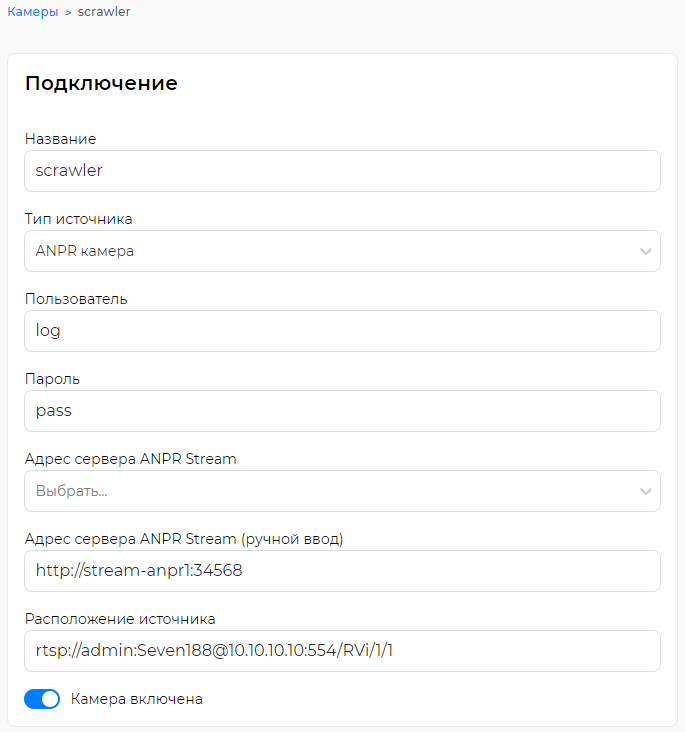
Добавьте камеру с типом источника ANPR камера. Параметры подключения камеры (Рисунок 120).
Загрузите превью камеры из файла или из CARS Stream.
Добавьте 1 зону распознавания. Настройка зоны распознавания (Рисунок 121).
Описание зон распознавания представлено в Таблице 49.
Таблица 49. Описание зон распознавания
| Зона | Описание | Назначение |
|---|---|---|
| droi | Зона распознавания | Основная зона распознавания ТС |
Описание настроек и параметров подключения см. в разделе «Камеры»
Настройка Side crawler камеры#
Добавьте камеру с типом источника ANPR камера. Параметры подключения камеры (Рисунок 122).
Загрузите превью камеры из файла или из CARS Stream.
Добавьте 1 зону распознавания. Настройка зоны распознавания (Рисунок 123).

Описание зон распознавания представлено в Таблице 50.
Таблица 50. Описание зон распознавания
| Зона | Описание | Назначение |
|---|---|---|
| droi | Зона распознавания | Основная зона распознавания ТС |
Описание настроек и параметров подключения см. в разделе «Камеры»
Раздел «Расширенные события»#
Отображение событий детекции ТС и распознавания атрибутов ТС и ГРЗ осуществляется в разделе «Расширенные события», подробное описание см. в разделе «События»
Фильтр событий на данный момент не поддерживается в разделе «Расширенные события»
Карточка расширенного события#
Карточка события показывает расширенную информацию о событии. Пример карточки события (Рисунок 124).
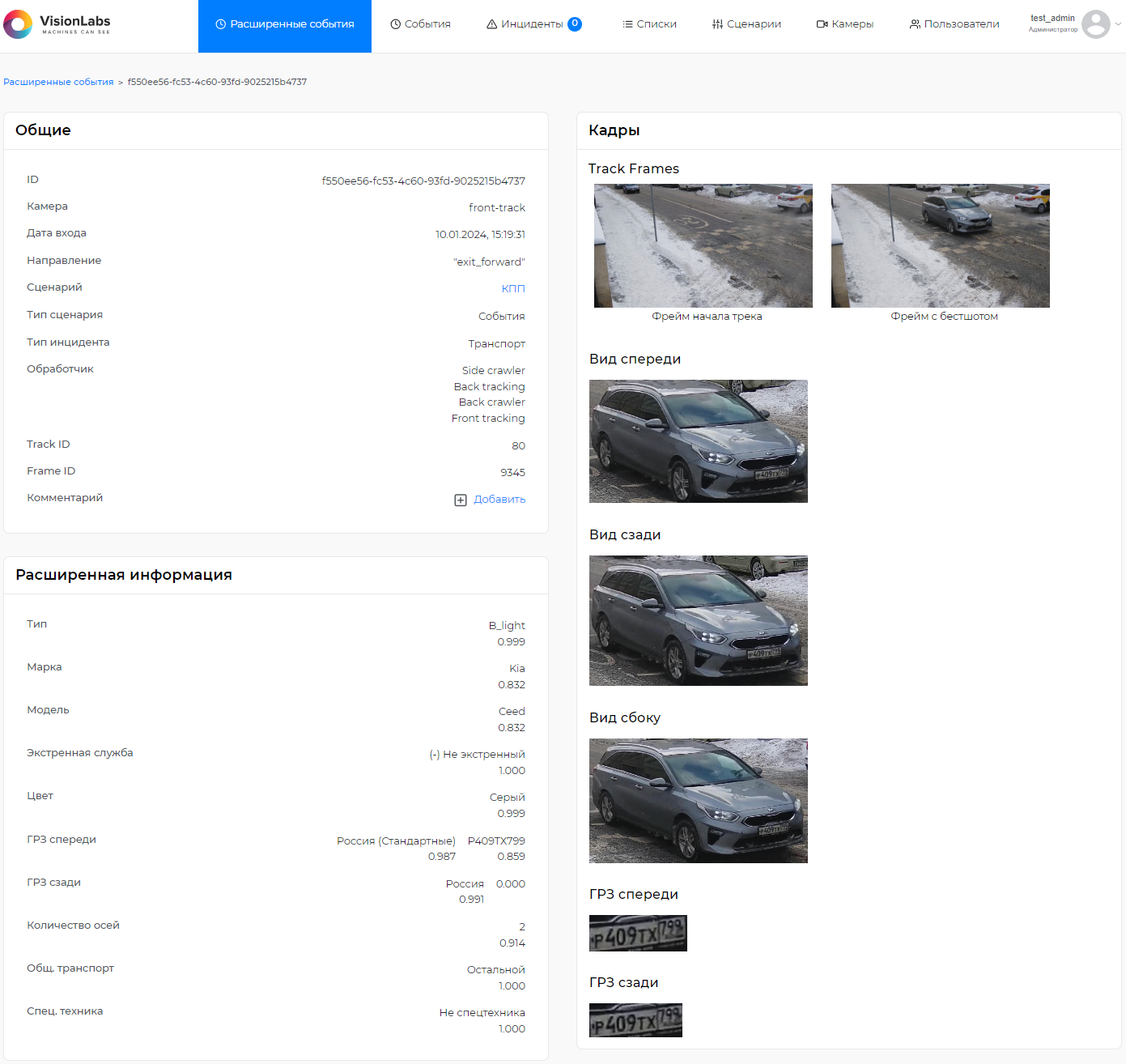
На изображении примера карточки события представлены нерелевантные изображения ТС в связи с физическим отсутствием дополнительных камер в других ракурсах.
Описание информации, представленной в карточке события приведено в Таблице 51.
Таблица 51. Информация на карточке события
| Блок информации | Название параметра | Описание |
|---|---|---|
| Общие | ID | Идентификатор события |
| Камера | Имя камеры, зафиксировавшей событие | |
| Дата входа | Дата и время регистрации события | |
| Направление | Направление движения ТС. exit_forward - направление вперед, exit_backward - направление назад | |
| Сценарий | Название сценария, по которому было детектировано событие. Название сценария является ссылкой на окно настроек сценария | |
| Тип сценария | Тип сценария, зафиксировавшего событие | |
| Тип инцидента | Тип детектированного объекта | |
| Обработчик | Название обработчика сценария | |
| Track ID | Идентификатор трека, в котором было зафиксировано событие | |
| Frame ID | Идентификатор кадра с изображением объекта | |
| Комментарий | Ссылка, при нажатии на которую открывается окно ввода комментария. После добавления комментария ссылка меняется на текст комментария | |
| Кадры | Track Frames | Изображения объекта в исходном (максимальном) разрешении: |
| - Фрейм начала трека – первый кадр, на котором был детектирован объект; | ||
| - Фрейм с бестшотом – лучший кадр трека. | ||
| Вид спереди | Изображение объекта спереди | |
| Вид сзади | Изображение объекта сзади | |
| Вид сбоку | Изображение объекта сбоку | |
| ГРЗ спереди | Изображение ГРЗ спереди | |
| ГРЗ сзади | Изображение ГРЗ сзади | |
| Расширенная информация | Тип | Атрибут ТС, показывающий к какому типу относится ТС |
| Марка | Атрибут ТС, показывающий распознанную марку ТС | |
| Модель | Атрибут ТС, показывающий распознанную модель ТС | |
| Экстренная служба | Атрибут принадлежности ТС к экстренным службам | |
| Цвет | Атрибут ТС, показывающий распознанный цвет ТС | |
| ГРЗ спереди | Атрибут ГРЗ, предоставляющий информацию о ГРЗ ТС спереди и стране принадлежности ГРЗ | |
| ГРЗ сзади | Атрибут ГРЗ, предоставляющий информацию о ГРЗ ТС сзади и стране принадлежности ГРЗ | |
| Количество осей | Атрибут ТС, показывающий количество распознанных осей ТС | |
| Общ. транспорт | Атрибут принадлежности ТС к общественному транспорту | |
| Спец. техника | Атрибут принадлежности ТС к специальной технике |
Числа у каждого атрибута являются оценкой качества распознавания этого атрибута. Оценка определяется в диапазоне от 0 до 1, чем ближе значение к 1, тем точнее является распознавание атрибута.