Раздел «Камеры»#
Раздел Камеры предназначен для отображения всех камер, статуса камер, превью камер и настройки параметров видеопотока для каждой камеры. В качестве источника камеры может выступать как RTSP поток, ANPR камера, так и видеофайл.
CARS_Analytics UI поддерживает одновременную работу с несколькими источниками видеопотоков.
Добавлять, обновлять, редактировать и удалять камеры может только Администратор.
Общий вид раздела «Камеры» (Рисунок 91). Описание столбцов таблицы камер представлено в Таблице 52.
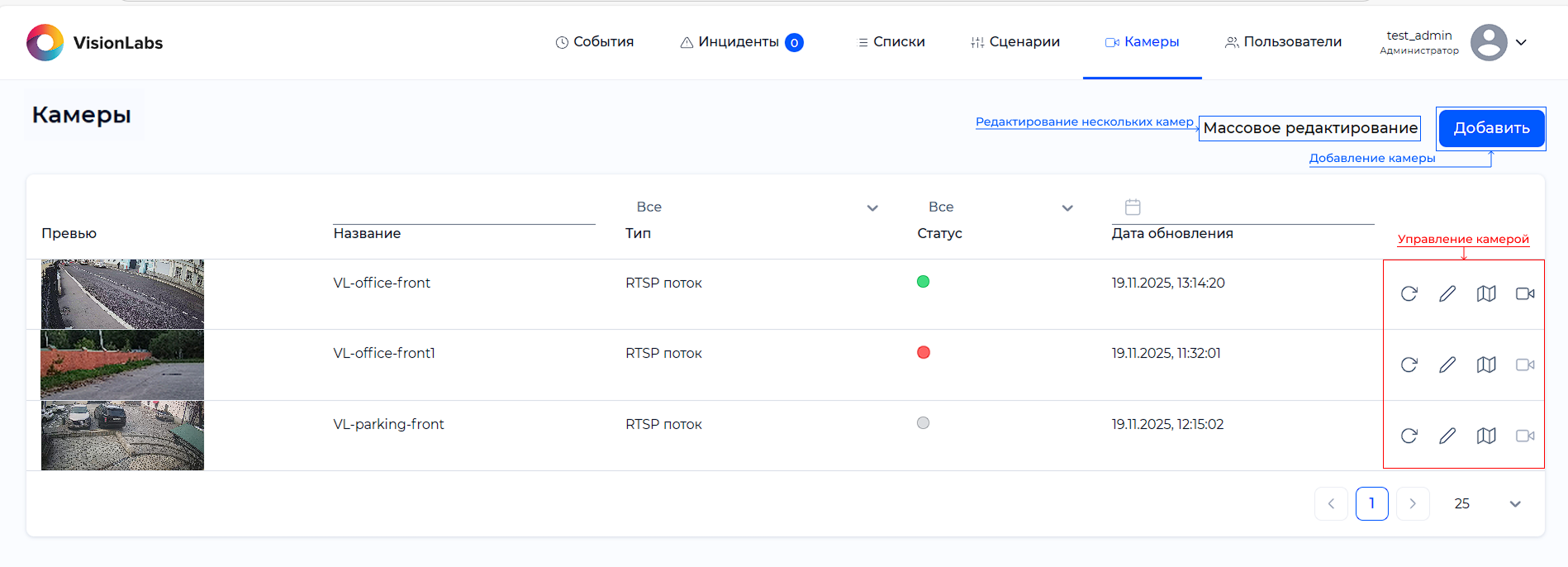
Таблица 52. Описание таблицы камер
| Название столбца | Описание |
|---|---|
| Превью | Превью изображения камеры |
| Название | Название камеры |
| Тип | Тип видеоисточника |
| Статус | Статус камеры |
| Дата обновления | Дата и время последнего обновления настроек камеры |
| Настройки управления | Кнопки управления камерой |
Раздел содержит зарегистрированные в CARS_Analytics камеры.
Цветовой индикатор в колонке «Статус» показывает статус камеры. Возможные статусы камеры представлены в Таблице 53.
Таблица 53. Статусы камер
| Статус | Описание |
|---|---|
 |
Камера функционирует корректно |
 |
Отсутствует связь с камерой (не отвечает на запросы CARS_Analytics UI) |
 |
Камера была отключена администратором, либо процесс настройки камеры не был завершён |
 |
Камера находится в процессе подключения |
Все взаимодействия с камерами происходит с помощью кнопок, расположенных в строке камеры (Таблица 54).
Таблица 54. Кнопки управления камерой
| Кнопка | Описание |
|---|---|
 |
Перезапуск камеры. Повторное подключение к камере по заданным параметрам |
 |
Редактирование камеры |
 |
Просмотр расположение камеры на карте |
 |
Просмотр видеопотока |
Добавление камеры#
Добавление камеры происходит на странице «Создание камеры» после нажатия кнопки «Добавить» в разделе «Камеры».
Общий вид страницы «Создание камеры» (Рисунок 92).
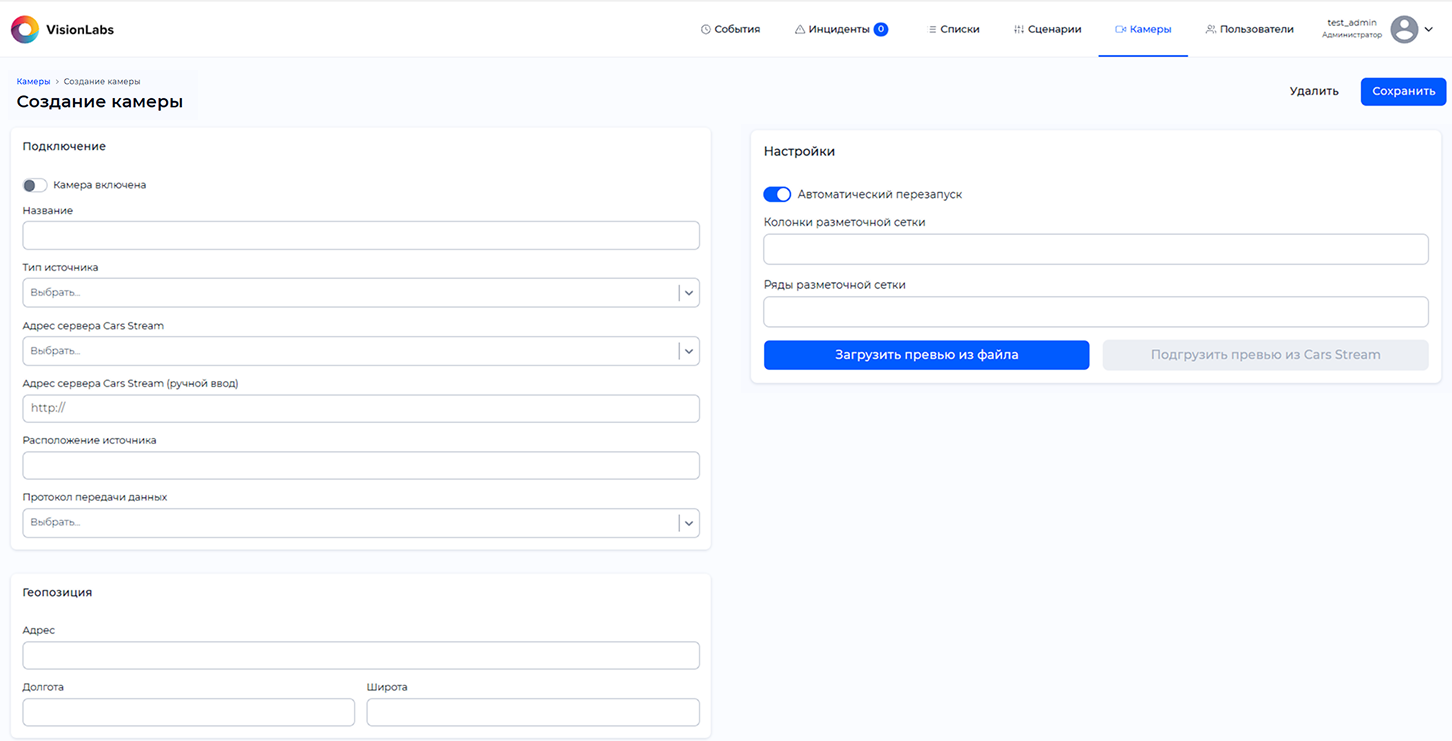
Страница включает в себя 3 основных блока:
| Блок | Назначение блока |
|---|---|
| Подключение | Параметры для подключения источника |
| Настройки | Настройки параметров камеры и зон детекции и распознавания |
| Геопозиция | Настройки для подключения геопозиция камеры |
Подключение камеры#
Параметры подключения камеры зависят от выбранного типа источника.
Пример настроек подключения камеры в блоке «Подключение» для типа источника RTSP поток или Видеофайл (Рисунок 93). Описание каждого поля представлено в Таблице 55.
Каждое поле формы блока «Подключение» является обязательным.
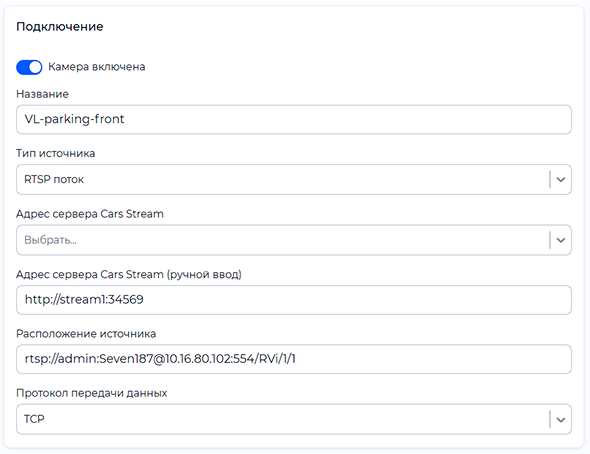
Таблица 55. Описание полей формы добавления камеры с типом источника RTSP поток или Видеофайл
| Название | Описание | Возможные значения |
|---|---|---|
| Переключатель работы камеры | Переключение работы камеры | On/off |
| Название | Отображаемое имя в списке камер | Может состоять из 1–255 знаков и содержать буквы, цифры и символы. |
| Тип источника | RTSP поток или Видеофайл. Для продуктового контура рекомендуется использовать RTSP поток, видеофайлы могут быть использованы для отладки работы, либо тестирования | - RTSP поток |
| - Видеопоток | ||
| Адрес сервера CARS_Stream | Поле для выбора IP-адреса с установленной подсистемой CARS_Stream. Если источник находится в одной сети с сервером CARS_Stream, то он будет отображаться в выпадающем списке | Выпадающий список с адресами серверов расположения подсистемы CARS_Stream |
| Адрес сервера CARS_Stream (ручной ввод) | Поле ввода IP-адреса сервера расположения подсистемы CARS_Stream для подключения к серверу во внешней сети | IP адрес CARS_Stream |
| Расположение источника | Адрес RTSP потока или расположение видеофайла. Путь до видеофайла может задаваться относительно расположения CARS_Stream на сервере | RTSP: rtsp://ip-адрес/… |
| Видеофайл: /var/lib/luna/cars/video.mp4 | ||
| Протокол передачи данных | Протокол передачи видеопотока | - TCP |
| - UDP |
После ввода параметров подключения необходимо выполнить настройку камеры.
Пример настроек подключения камеры в блоке «Подключение» для типа источника ANPR камера (Рисунок 94). Описание каждого поля представлено в Таблице 56.
Каждое поле формы блока «Подключение» является обязательным.
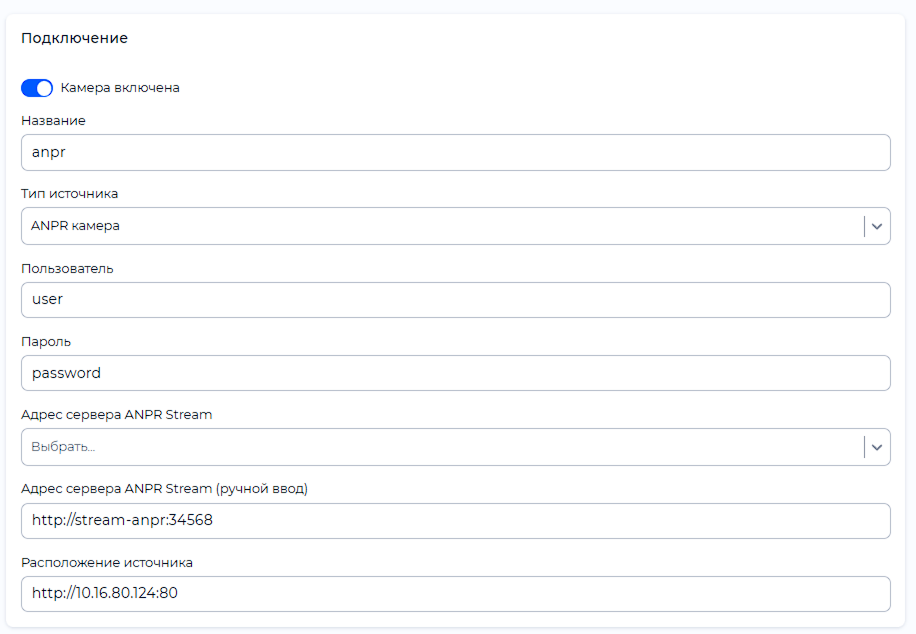
Таблица 56. Описание полей формы добавления камеры с типом источника ANPR камера
| Название | Описание | Возможные значения |
|---|---|---|
| Переключатель работы камеры | Переключение работы камеры | On/off |
| Название | Отображаемое имя в списке камер | Может состоять из 1–255 знаков и содержать буквы, цифры и символы. |
| Тип источника | ANPR камера | ANPR камера |
| Пользователь | Имя пользователя ANPR камеры | Может состоять из 1–255 знаков и содержать буквы, цифры и символы. |
| Пароль | Пароль пользователя ANPR камеры | Может состоять из 1–255 знаков и содержать буквы, цифры и символы. |
| Адрес сервера ANPR Stream | Поле для выбора IP-адреса с установленной подсистемой ANPR Stream. Если источник находится в одной сети с сервером ANPR Stream, то он будет отображаться в выпадающем списке | Выпадающий список с адресами серверов расположения подсистемы ANPR Stream |
| Адрес сервера ANPR Stream (ручной ввод) | Поле ввода IP-адреса сервера расположения подсистемы ANPR Stream для подключения к серверу во внешней сети | IP адрес ANPR Stream |
| Расположение источника | Поле ввода IP-адреса ANPR камеры | http://ip-адрес/… |
После ввода параметров подключения необходимо выполнить настройку камеры.
Настройки камеры#
Блок настроек камеры включает в себя два больших подраздела: управление зонами распознавания и параметры.
Управление зонами распознавания#
Данный подраздел используется для управления зонами детекции и распознавания (Рисунок 95), а также направления движения (Рисунок 96). Описание настроек представлено в Таблице 57.
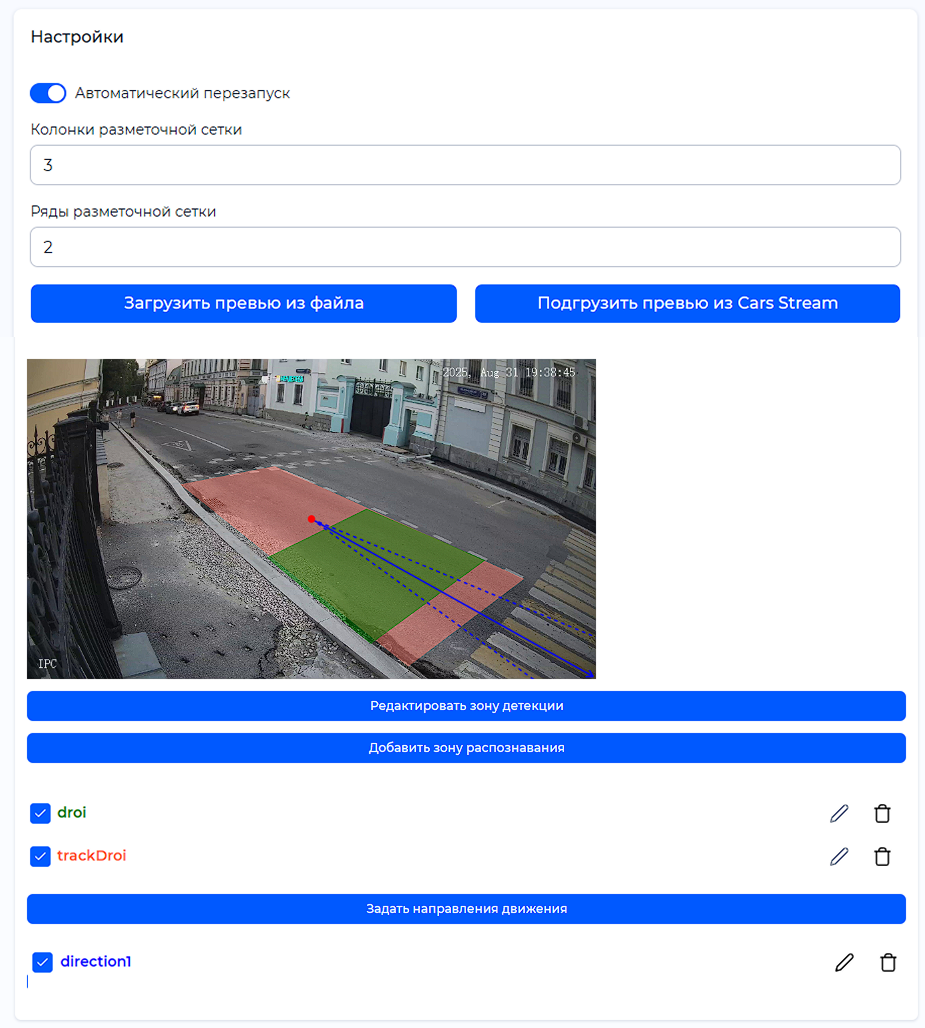
Таблица 57. Описание настроек камеры
| Название | Описание | Возможные значения |
|---|---|---|
| Автоматический перезапуск | Автоматическая попытка подключения к камере при потере связи с камерой. Количество попыток и временной интервал задается при установке | On/Off |
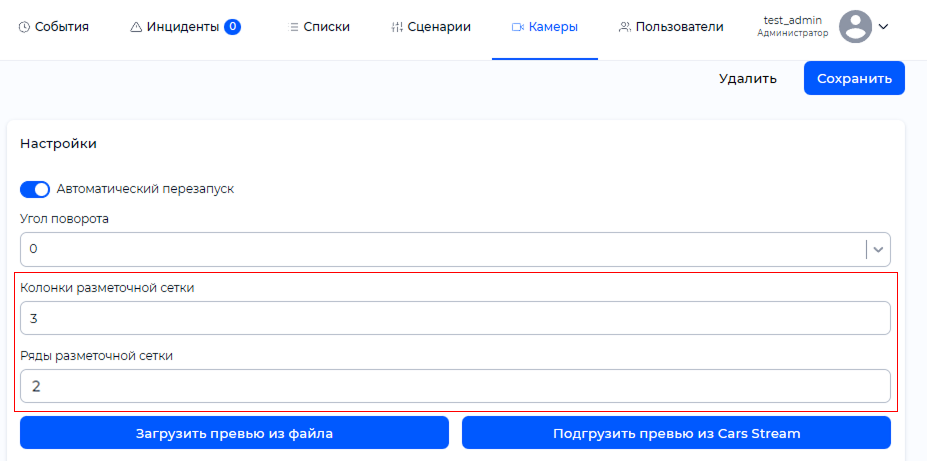
| Колонки разметочной сетки | Число вертикальных делений кадра для работы детектора | Количество блоков по вертикали |
| Ряды разметочной сетки | Число горизонтальных делений кадра для работы детектора | Количество блоков по горизонтали |
| Превью | Превью (изображение с камеры) необходимо для нанесения зон распознавания и детекции. Без превью невозможна корректная работа CARS_Analytics. | Изображение в формате, отвечающее требованиям, указанным в Таблице 6 |
| Алгоритм добавления превью из файла: | ||
| 1. Сделать снимок видеопотока в исходном разрешении | ||
| 2. Нажать кнопку Загрузить превью из файла | ||
| 3. Выбрать изображение в окне проводника | ||
| Для добавления превью из CARS_Stream необходимо нажать на соответствующую кнопку. После нажатия будет создана задача «Получение превью». После выполнения задачи превью автоматически добавится в настройки | ||
| Редактировать зону детекции | Зона детекции определяет область интереса, обрабатываемая CARS_Stream для целей детекции и слежения за объектами | Зона детекция, нанесённая на превью камеры |
| Добавить зону распознавания | Зона распознавания определяет область распознавания атрибутов ТС и ГРЗ внутри зоны детекции | Зона распознавания, нанесённая на превью камеры |
| Задать направления движения | Позволяет добавить направление движения ТС для сопоставления с реальной траекторией. По нажатию «Задать направление движения» открывается модальное окно: рисуется вектор (стрелка от центра кадра), задаётся наименование, курсовой угол и предельный порог отклонения. Движение считается соответствующим, если минимальная разность углов между вектором перемещения ТС и заданным курсовым углом не превышает предельный порог | - Наименование — Может состоять из 1–255 знаков и содержать буквы, цифры и символы; |
| Курсовой угол относительно центра кадра — 0…359°; | ||
| Предельный порог — 0…90° |

Параметры камеры#
Данный подраздел предназначен для управления настройками камеры и параметрами детекции и распознавания объектов.
Изменение параметров камеры может привести к ошибкам в работе Системы LUNA CARS. Настраивать параметры следует только опытным пользователям или под руководством инженеров VisionLabs.
Интерфейс параметров камеры в блоке «Настройки» для типов источника RTSP поток или Видеофайл (Рисунок 97). Описание настроек представлено в Таблице 58.
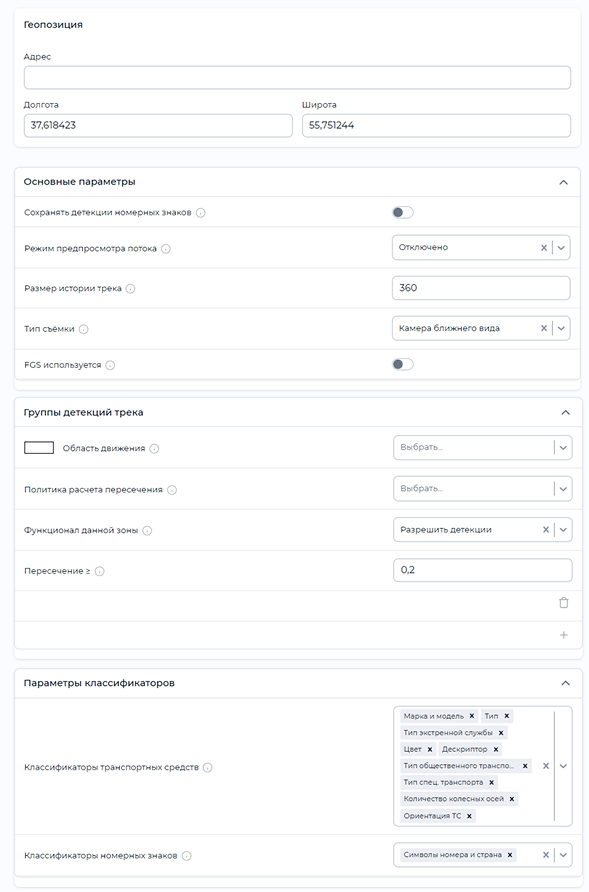
Таблица 58. Описание параметров камеры с типом источника RTSP поток или Видеофайл
| Название | Описание | Возможные значения |
|---|---|---|
| Общие параметры | Раздел, где задаются общие параметры настройки камеры | - |
| Сохранять детекции номерных знаков | Включение функции сохранения информации о детекциях ГРЗ: координаты положения детектированного ГРЗ в общей истории перемещения. Данные доступны при выгрузке JSON файла, генерируемом CARS_API | On/Off |
| Режим предпросмотра потока | Выбор режима трансляции видеопотока в реальном времени | - Выключен – режим предпросмотра выключен |
| - Простой – режим предпросмотра, на котором отображаются только BBox детектированных объектов | ||
| - Интерактивный – режим предпросмотра, на котором отображаются BBox детектированных объектов и распознанные атрибуты | ||
| Размер истории трека | параметр, ограничивающий длину хранимой истории трека: сохраняются только N самых свежих детекций каждого ТС. Чем больше N, тем длиннее траектории, но выше потребление памяти. Например, для сцен с долгими простоями ТС нужно уменьшать N, а для аналитики траекторий увеличивать | 1…N. Верхняя граница может ограничиваться конфигурацией/настройками системы |
| Тип съемки | Выбор типа съемки камеры | - Ближний ракурс (выбрано по умолчанию) |
| - Обзорная камера - обзорная камера для городского наблюдения | ||
| - Съемка с большой высоты | ||
| - Пост контроля | ||
| FGS используется | Включение технологии FGS | On/Off |
| Группы детекций трека | Раздел для создания одного или нескольких наборов правил трекинга. По нажатию «+» добавляется набор полей. Повторное нажатие «+» создаёт ещё один набор. Ненужный набор можно удалить иконкой «корзина» | - |
| Область движения | Зона детекции, с которой проверяется пересечения ТС. Введение дополнительной зоны позволит отсекать события, которые не требуется фиксировать | Созданные зоны для выбранной камеры |
| Политика расчёта пересечения | Выпадающий список, задающий, относительно какой площади считать процент пересечения ТС с выбранной зоной: зона (площадь пересечения/площадь зоны), детекция ТС (площадь пересечения/площадь детекции) или меньшая из площадей (площадь пересечения/min(площади зоны, площади детекции)) | - Относительно площади зоны; |
| - Относительно площади детекции; | ||
| - Относительно меньшей площади | ||
| Функционал данной зоны | Выпадающий список, задающий политику учёта детекций для выбранной области | - Разрешить детекции - учитывать все объекты, попавшие в область; |
| - Запретить детекции - игнорировать все объекты, попавшие в область; | ||
| - Запретить только создание новых отслеживаний - учитывать уже отслеживаемые объекты, но не начинать новые отслеживания внутри области | ||
| Пересечение >= | Опциональный параметр, определяющий минимальную относительную площадь пересечения детекции ТС с «Областью движения», при превышении которой фиксируется событие/инцидент. Чем выше порог, тем точнее будет детекция ТС, но это может увеличить количество пропусков. При вводе значений меньше 0 или больше 1 появится ошибка. Также при вводе значений с более чем тремя знаками после запятой появится предупреждение с указанием двух ближайших допустимых значений | 0.01…1.00 |
| Параметры классификаторов | Раздел, в котором выбираются атрибуты ТС и ГРЗ для распознавания | - |
| Классификаторы ТС | Выпадающий список доступных классификаторов ТС для распознавания атрибутов ТС. При детекции ТС система будет распознавать только выбранные атрибуты. Исключенные атрибуты не будут распознаваться системой | - Марка и модель |
| - Тип | ||
| - Тип экстренной службы | ||
| - Цвет | ||
| - Дескриптор | ||
| - Тип общественного транспорта | ||
| - Тип спец. транспорта | ||
| - Количество колесных осей | ||
| - Ориентация ТС | ||
| Классификаторы ГРЗ | Выпадающий список доступных классификаторов ГРЗ для распознавания атрибутов ГРЗ. При детекции ГРЗ система будет распознавать только выбранные атрибуты. Исключенные атрибуты не будут распознаваться системой | Символы номера и страна |
| Сохранять полные кадры | Регулирует сохранение полных кадров | On/Off |
| Сохранять все лучшие кадры | По умолчанию сохраняется только один лучший кадр, кадр начала и конца трека. Данный флаг активирует сохранение всех лучших кадров, полученных системой | On/Off |
| Параметры детектора транспортных средств | Раздел для настройки детектора ТС | On/Off |
| Размер изображения | Размер изображения в пикселях по большей стороне, на котором происходит детекция объекта. Увеличение размера позволит лучше детектировать объект на дальнем плане (или маленькие ГРЗ на больших ТС), но это увеличит время обработки | 320…1280 |
| Порог детекции | Пороговое значение детектора для обнаружения объекта. При пересечении объектом зоны детекции меньше заданного порога, детекция не будет зарегистрирована | 0…1 |
| Порог повторного обнаружения | Пороговое значение редектора для обнаружения объекта. При пересечении объектом зоны детекции меньше заданного порога, детекция не будет зарегистрирована | 0…1 |
| Параметры детектора номерных знаков | Раздел для настройки детектора ГРЗ | - |
| Размер изображения | Размер изображения в пикселях по большей стороне, на котором происходит детекция объекта. Увеличение размера позволит лучше детектировать объект на дальнем плане (или маленькие ГРЗ на больших ТС), но это увеличит время обработки | 220…1280 |
| Порог детекции | Пороговое значение детектора для обнаружения объекта. При пересечении объектом зоны детекции меньше заданного порога, детекция не будет зарегистрирована | 0…1 |
| Параметры повторного обнаружения | Раздел для настройки редектора | - |
| Поиск утерянных повторных обнаружений | Выбор алгоритма поиска потерянных детекций после процедуры редетекции | - Трекер – алгоритм, при котором поиск потерянных детекций происходит путем предсказания траектории движения объекта; |
| - Детектор – алгоритм, при котором поиск потерянных детекций происходит путем повторного запуска алгоритма детектирования на кадре | ||
| Максимальное количество пропущенных повторных обнаружений | Максимальное количество кадров, на которых может быть пропущен запуск поиска потерянных редетекций при помощи трекера | 0…1000 |
| Максимальное количество пропущенных повторных обнаружений по FGS | Максимальное количество кадров, на которых может быть пропущен запуск поиска потерянных редетекций при помощи FGS, если регионы с движениями не найдены | 0…1000 |
| Порог пересечения с регионами FGS | Пороговое значение пересечения детекции с регионами движения FGS. При пересечении выше указанного нельзя пропускать запуск редектора | 0…1 |
| Параметры FGS | Раздел для настройки FGS | - |
| Частота модели | Частота обновления модели FGS в кадрах | 0…1000 |
| Масштаб модели | Число, на которое будет увеличен кадр для построения модели FGS | 0…1 |
| Размер ядра открывающей операции FGS | Размер участков шума (в пикселях), которые необходимо удалять при получении областей кадра, на которых было движение | 1…N |
| Размер ядра закрывающей операции FGS | Размер участков (предполагаемых, что это статичный фон), которые необходимо удалять из объектов переднего плана в пикселях при получении регионов, на которых детектируется движение | 1…N |
| Минимальная детекция FGS | Минимальный размер области переднего плана, возвращаемой для модели FGS | 1…N |
| Параметры коррекции атрибутов | Раздел, где задаются параметры фильтрации атрибутов ТС с целью исключить противоречащие значения. Например, для случаев, когда для ТС одновременно распознается тип экстренной службы и тип общественного транспорта. Для указанных атрибутов задаются пороги точности распознавания. При точности распознавания атрибута меньше заданной, показатель не учитывается, точность оценивается как 0 | On/Off |
| Порог модели | Пороговое значение точности распознавания для атрибутов «Марка ТС» и «Модель ТС». Распознавания с точностью ниже заданной не учитываются при отображении результатов распознавания | 0…1 |
| Порог типа ТС | Пороговое значение точности распознавания для атрибута «Типы ТС». Распознавания с точностью ниже заданной не учитываются при отображении результатов распознавания | 0…1 |
| Порог типа ТС экстренных служб | Пороговое значение точности распознавания для атрибута «Экстренные службы». Распознавания с точностью ниже заданной не учитываются при отображении результатов распознавания | 0…1 |
| Порог типа спецтранспорта | Пороговое значение точности распознавания для атрибута «Спец.техника». Распознавания с точностью ниже заданной не учитываются при отображении результатов распознавания | 0…1 |
| Порог типа общественного транспорта | Пороговое значение точности распознавания для атрибута «Общ.транспорт». Распознавания с точностью ниже заданной не учитываются при отображении результатов распознавания | 0…1 |
| Настройки AGS для номерного знака | Раздел, где задаются настройки AGS | On/Off |
| Верхний порог | Значение AGS номерного знака, при достижении которого изображение будет считаться хорошим. | 0…1 |
| Нижний порог | Значение AGS номерного знака, ниже которого изображение будет считаться плохим | 0…1 |
| Получать информацию о прицепе ТС из carstream | Раздел, включающий получение и обработку сведений о прицепах из CarStream | On/Off |
| Порог пересечения автомобиля и прицепа | Пороговое значение перекрытия детекций «ТС» и «Прицеп». При превышении порога треки считаются конфликтными и выполняется завершение одного из треков | 0…1 |
| Порог обнаружения типа «Прицеп» | Пороговое значение точности распознавания для атрибута «Прицеп». Распознавания с точностью ниже заданной не учитываются при отображении результатов распознавания | 0…1 |
| Настройки детектора дыма/огня | Раздел, включающий использование детектора «Дым/Огонь» и связанных параметров | On/Off |
| Минимальный порог оценки | Пороговое значение точности детектора «Дым/Огонь». Распознавания с точностью ниже заданной не учитываются при фиксации событий | 0…1 |
| Настройки детектора саботажа | Раздел, включающий использование детектора «Саботаж» и связанных параметров | - |
| Максимальная частота срабатывания | Настройка определяет периодичность срабатывания обработчика «Саботаж». Значение может быть установлено от 0 до N, где 0 — означает отсутствие ограничения, а N — максимальный интервал в кадрах между срабатываниями обработчика. Чем выше значение, тем реже будет происходить проверка на смену кадра | 0…N |
Интерфейс параметров камеры в блоке «Настройки» для типа источника ANPR камера (Рисунок 98). Описание настроек представлено в Таблице 59.
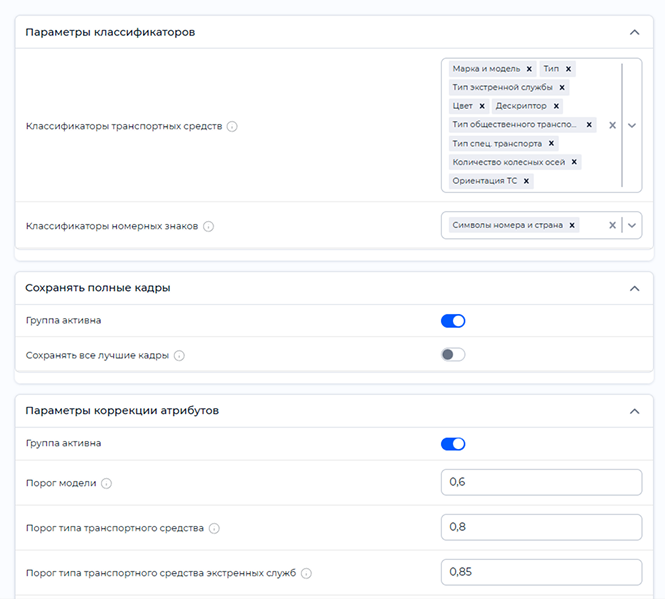
Таблица 59. Описание параметров камеры с типом источника ANPR камера
| Название | Описание | Возможные значения |
|---|---|---|
| Параметры классификаторов | Раздел, в котором выбираются атрибуты ТС и ГРЗ для распознавания | - |
| Классификаторы ТС | Выпадающий список доступных классификаторов ТС для распознавания атрибутов ТС. При детекции ТС система будет распознавать только выбранные атрибуты. Исключенные атрибуты не будут распознаваться системой | - Марка и модель |
| - Тип | ||
| - Тип экстренной службы | ||
| - Цвет | ||
| - Дескриптор | ||
| - Тип общественного транспорта | ||
| - Тип спец. транспорта | ||
| - Количество колесных осей | ||
| - Ориентация ТС | ||
| Классификаторы ГРЗ | Выпадающий список доступных классификаторов ГРЗ для распознавания атрибутов ГРЗ. При детекции ГРЗ система будет распознавать только выбранные атрибуты. Исключенные атрибуты не будут распознаваться системой | Символы номера и страна |
| Сохранять полные кадры | Регулирует сохранение полных кадров | On/Off |
| Сохранять все лучшие кадры | По умолчанию сохраняется только один лучший кадр, кадр начала и конца трека. Данный флаг активирует сохранение всех лучших кадров, полученных системой | On/Off |
| Параметры коррекции атрибутов | Раздел, где задаются параметры фильтрации атрибутов ТС с целью исключить противоречащие значения. Например, для случаев, когда для ТС одновременно распознается тип экстренной службы и тип общественного транспорта. Для указанных атрибутов задаются пороги точности распознавания. При точности распознавания атрибута меньше заданной, показатель не учитывается, точность оценивается как 0 | On/Off |
| Порог модели | Пороговое значение точности распознавания для атрибутов «Марка ТС» и «Модель ТС». Распознавания с точностью ниже заданной не учитываются при отображении результатов распознавания | 0…1 |
| Порог типа ТС | Пороговое значение точности распознавания для атрибута «Типы ТС». Распознавания с точностью ниже заданной не учитываются при отображении результатов распознавания | 0…1 |
| Порог типа ТС экстренных служб | Пороговое значение точности распознавания для атрибута «Экстренные службы». Распознавания с точностью ниже заданной не учитываются при отображении результатов распознавания | 0…1 |
| Порог типа спецтранспорта | Пороговое значение точности распознавания для атрибута «Спец.техника». Распознавания с точностью ниже заданной не учитываются при отображении результатов распознавания | 0…1 |
| Порог типа общественного транспорта | Пороговое значение точности распознавания для атрибута «Общ.транспорт». Распознавания с точностью ниже заданной не учитываются при отображении результатов распознавания | 0…1 |
Интерфейс параметров камеры в блоке «Настройки» для типа источника RTSP буфер (Рисунок 99). Описание настроек представлено в Таблице 60.
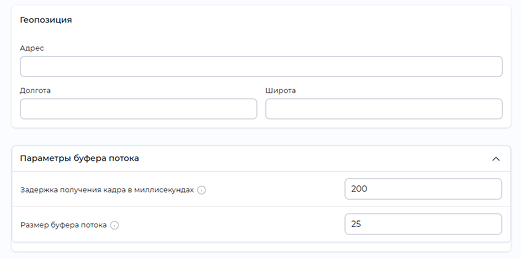
Таблица 60. Описание параметров камеры с типом источника RTSP буфер
| Название | Описание | Возможные значения |
|---|---|---|
| Параметры буфера потока | Позволяет настроить, как кадры отбираются из входного буфера в выходной поток: интервал выборки (задержка, мс) и размер буфера (количество хранимых кадров) | - |
| Задержка получения кадра в миллисекундах | Интервал между выборками кадров из RTSP-буфера в выходной поток. Влияет на эффективную частоту кадров и задержку | 1…100000 |
| Размер буфера потока | Количество кадров, хранимых в RTSP-буфере для последующей выборки | 1…1000 |
Типы съемки#
С помощью данного параметра модифицируется алгоритм трекинга объектов. Неверный тип съемки может провоцировать обрывы треков, дубли событий. В системе предусмотрено 4 типа съемки. Каждый тип съемки используется в зависимости от задач и условий видеонаблюдения:
1․ Ближний ракурс Подходит для камер, установленных на высоте от 2 до 3 метров, на удалении не менее 1,5 метров от полосы движения. Может использоваться для регистрации событий проездов как без преграждающих устройств, без остановки, так и для регистрации событий проездов с кратковременной остановкой (на время ожидания открытия преграждающего устройства) перед преграждающим устройством. Ограничений на количество ТС в зоне трекинга нет.
2․ Обзорная камера Подходит для дорожных камер, установленных для наблюдения за городскими или трассовыми участками, например, городские дороги, шоссе и магистрали. Камеры должны быть расположены на высоте более 4 метров (за исключением отвесного ракурса съемки). Ограничений на количество ТС в зоне трекинга нет.
3․ Съемка с большой высоты Этот тип съемки предполагает съемку сверху с большой высоты (включая отвесный ракурс, bird-view), например, с дронов. Ограничений на количество ТС в зоне трекинга нет.
4․ Пост контроля Подходит для зон досмотра со шлагбаумом или стоп-линией, с длительной остановкой для прохождения процедур досмотра и регистрации в сторонних системах с участием человека. Камеры должны быть расположены на высоте от 2 до 3 метров, могут располагаться вплотную к полосе движения. Количество ТС в зоне трекинга не должно быть больше двух.
Классификаторы#
Классификатор – это объект подсистемы CARS_API, предназначенный для распознавания отдельных атрибутов транспортного средства (ТС) или государственного регистрационного знака (ГРЗ). Классификаторы позволяют определять атрибуты ТС или ГРЗ, а результаты их работы отображаются в карточке события или инцидента.
Ниже приведена таблица соответствия классификаторов, используемых в настройках камеры в интерфейсе CARS_Analytics, и соответствующих им классификаторов подсистемы LUNA CARS_API. В ней приведено соответствие полей данных атрибутов и классификаторов LUNA CARS_API, с помощью которых эти атрибуты определяются.
Таблица 61. Таблица соответствия классификаторов
| Классификатор в настройках камеры | Классификатор в LUNA CARS_API |
|---|---|
| Тип | vehicle_type |
| Марка и модель | car_brand_model |
| Цвет | detailed_vehicle_color |
| Тип экстренной службы | detailed_vehicle_emergency |
| Тип общественного транспорта | public_transport_type |
| Тип спец. транспорта | special_transport_type |
| Количество колесных осей | vehicle_axles |
| Дескриптор | vehicle_descriptor |
| Ориентация ТС | vehicle_orientation |
| Символы номера и страна | grz_all_countries |
Геопозиция камеры#
Данный блок содержит поля для заполнения информации о местоположении камеры (Рисунок 100).
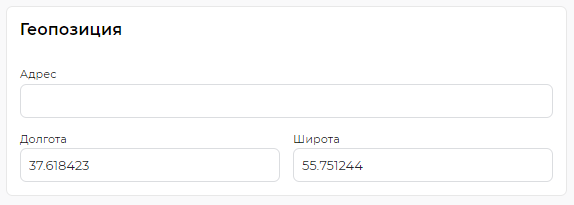
Заполнение данных полей позволит показать точное местоположение камеры на карте при клике на соответствующую иконку в списке камер. По умолчанию для каждой камеры заполняются координаты.
Зона детекции#
Зона детекции задаёт область интереса, обрабатываемую CARS_Stream для целей детекции и слежения за объектами. Может быть настроена в виде прямоугольного четырёхугольника внутри кадра.
Для настройки и редактирования зоны детекции необходимо нажать на кнопку «Редактировать зону детекции».
CARS_Stream обрабатывает область только внутри выделенного прямоугольника.
Правильное определение зоны детекции существенно повышает производительность работы LUNA CARS. С помощью зоны детекции можно отсечь области кадра, на которых нет необходимости детектировать объекты и определять атрибуты ТС и ГРЗ.
Пример добавления зоны детекции (Рисунок 101).
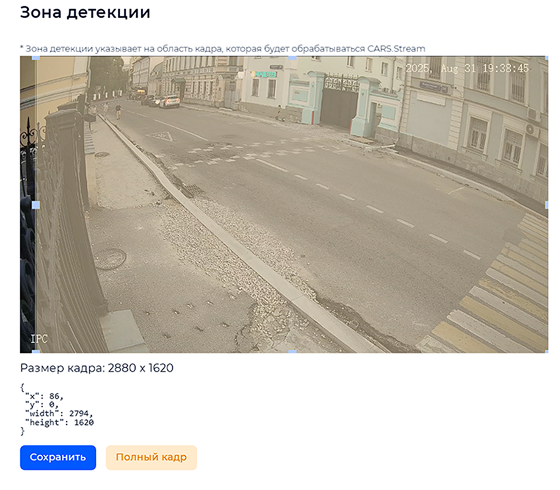
Зона детекции отображается на превью как жёлтая прямоугольная область (только выделенная область будет обрабатываться CARS_Stream).
Редактирование зоны детекции#
Для редактирования зоны детекции необходимо нажать «Редактировать зону детекции».
Для изменения формы зоны детекции необходимо «потянуть» её за одну из контрольных точек, расположенных по периметру.
Для перемещения зоны детекции необходимо кликнуть по жёлтой области и перенести ее внутри превью.
Для сброса задания зоны детекции необходимо нажать кнопку «Полный кадр».
Под превью располагаются геометрические параметры зоны детекции:
- Размер кадра – размер полного кадра превью;
- Координаты зоны детекции – координаты «Х» и «Х» c начальной точкой в левом верхнем углу превью;
- Ширина и высота зоны детекции.
После завершения настройки зоны детекции необходимо нажать на кнопку «Сохранить» в нижнем левом углу окна. Для отмены добавления зоны нажмите на клавиатуре [Esc] или кликните левой кнопкой мыши по области вокруг формы.
При необходимости начать добавление зоны заново, нажмите кнопку «Сбросить».
Зона распознавания#
Зона распознавания задаёт область регистрации событий распознавания внутри зоны детекции. Является многоугольником, настраиваемым произвольной формы на превью камеры. CARS_Analytics UI поддерживает создание неограниченного количества зон распознавания.
Сценарии взаимодействия объектов с зоной распознавания определяются обработчиками (подробнее в разделе Обработчики).
Детектирование и трекинг объектов выполняется по всей зоне детекции, но лучший кадр выбирается только для объектов, пересекших зону распознавания с заданным порогом. Использование зоны распознавания позволяет ограничить область для определения лучшего кадра без потери информации о треке объекта за границами зоны распознавания.
Принцип взаимодействия BBox объекта и зоны распознавания (Рисунок 102).
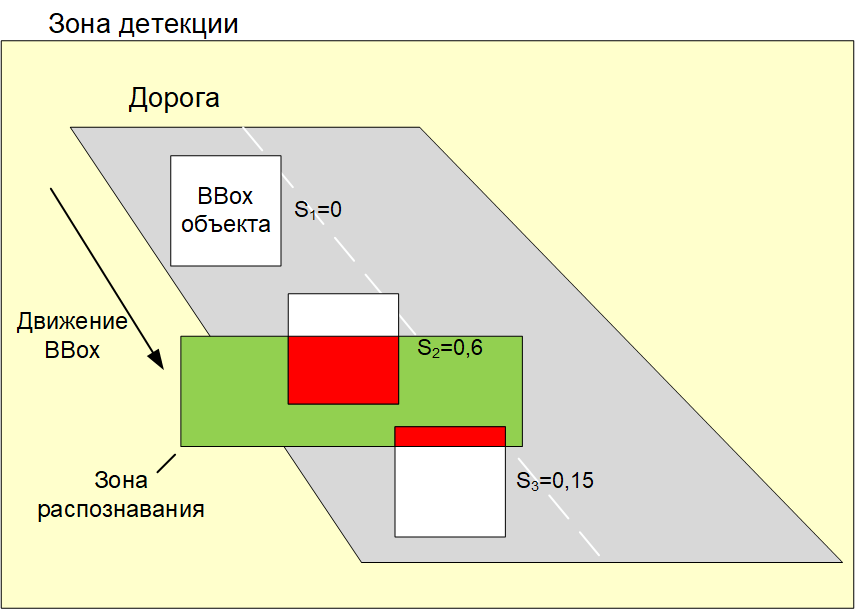
Si – площадь зоны распознавания (красный цвет), которую перекрыл BBox объекта для i-го кадра. Значение Si будет сравниваться с пороговым значением. Сценарий срабатывает, когда значение Si превышает пороговое.
При построении зон необходимо учитывать направление движения объекта в окрестности зоны, так как на разных кадрах и для разных траекторий движения площадь пересечения BBox и зоны распознавания будет отличаться
Пример «следов» траекторий ТС (Рисунок 103).
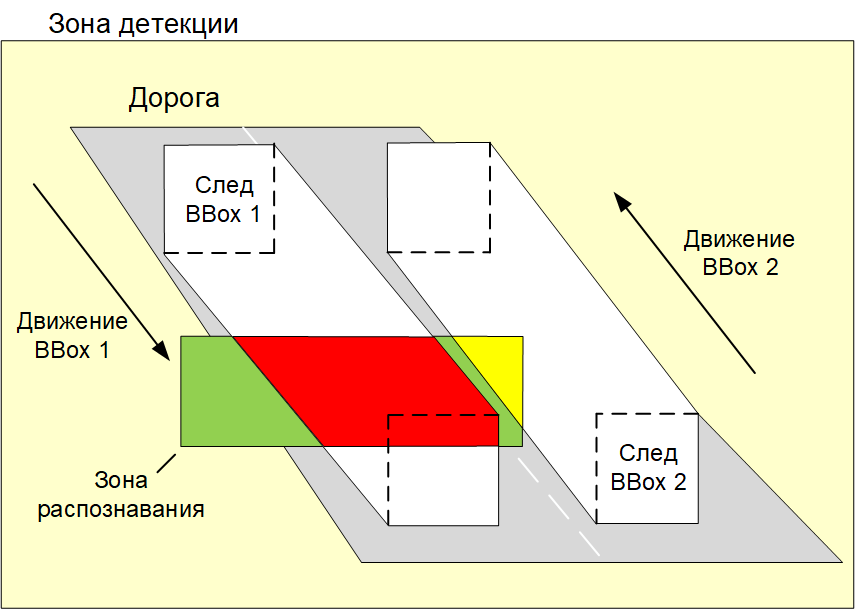
Красным цветом отмечена итоговая площадь зоны пересечения BBox и зоны распознавания, которую перекроет BBox 1, желтым – BBox 2. Площадь пересечения BBox 1 больше площади пересечения BBox 2 и лучший кадр будет выбираться только для BBox 1. При условии, если пороговое значение для пересечения и направление движения не заданы, то оба BBox будут обработаны системой.
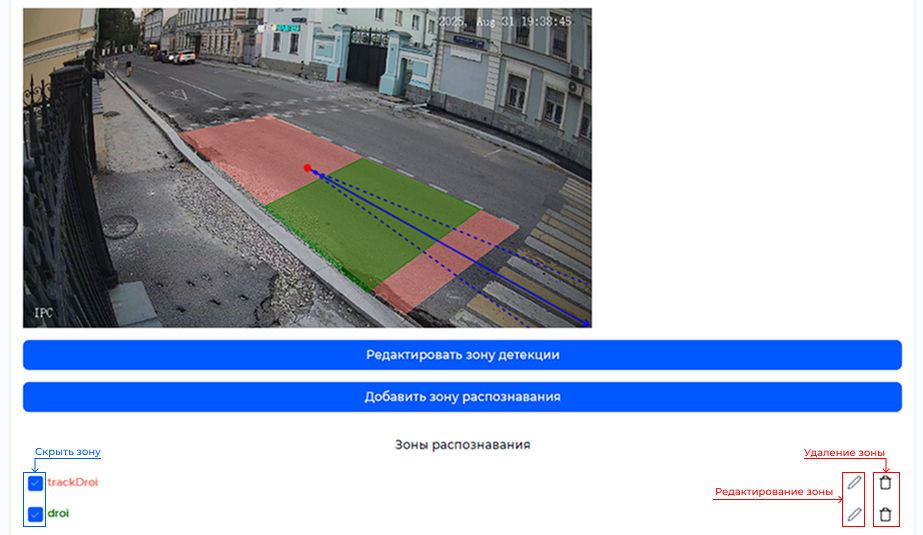
Список созданных зон распознавания находится в настройках камеры (Рисунок 104). Каждая зона имеет цвет, соответствующий цвету наименования зоны.
Создание и редактирование зоны распознавания#
Для создания зоны распознавания необходимо нажать кнопку «Добавить зону распознавания».
Для редактирования зоны распознавания необходимо нажать на  в строке нужной зоны. Окно управления зоной распознавания (Рисунок 105).
в строке нужной зоны. Окно управления зоной распознавания (Рисунок 105).
Рекомендуется строить зоны распознавания в плоскости камеры без привязки к окружению, так как проверка вхождения объекта в зону происходит с прямоугольными BBox, а не произвольной формой объекта. Рекомендации по созданию зон для применения в промышленной эксплуатации с примерами использования обработчиков приведены в разделе Обработчики.
Алгоритм создания зоны распознавания:
1․ Создайте зону распознавания: Чтобы создать зону распознавания, задайте вершины многоугольника, который будет её представлять. Для добавления вершины кликните левой кнопкой мыши на превью камеры. Не рекомендуется использовать более 10 вершин. Убедитесь, что грани многоугольника не пересекаются, и что зона распознавания больше, чем BBox для детектируемых объектов.
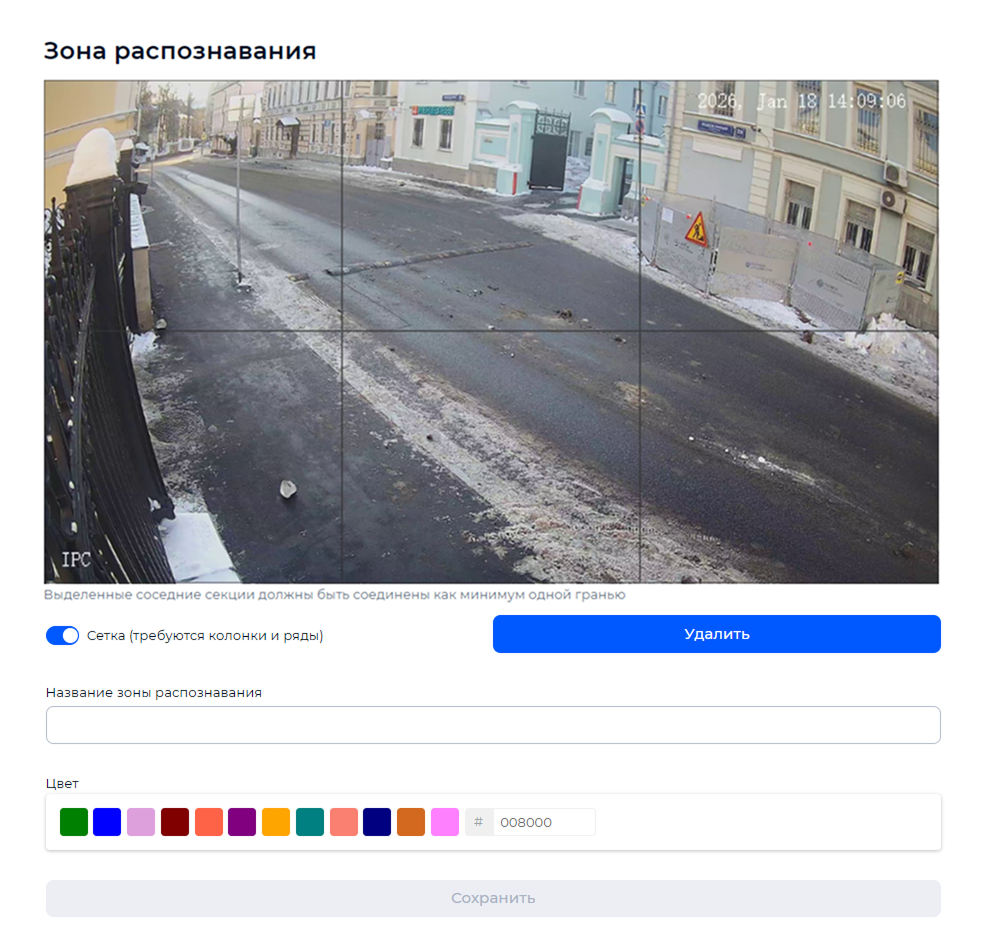
Также можно создать зону распознавания, выбрав сектора сетки. Для этого предварительно настройте количество колонок и рядов в разметочной сетке (Рисунок 106). Включите сетку с помощью переключателя для задания секторов (Рисунок 107). Чтобы выбрать ячейку сетки, кликните на неё. Повторный клик отменит выбор. Пример использования разметочной сетки можно найти в разделе Обработчики для обработчика «Отслеживание дыма и огня».
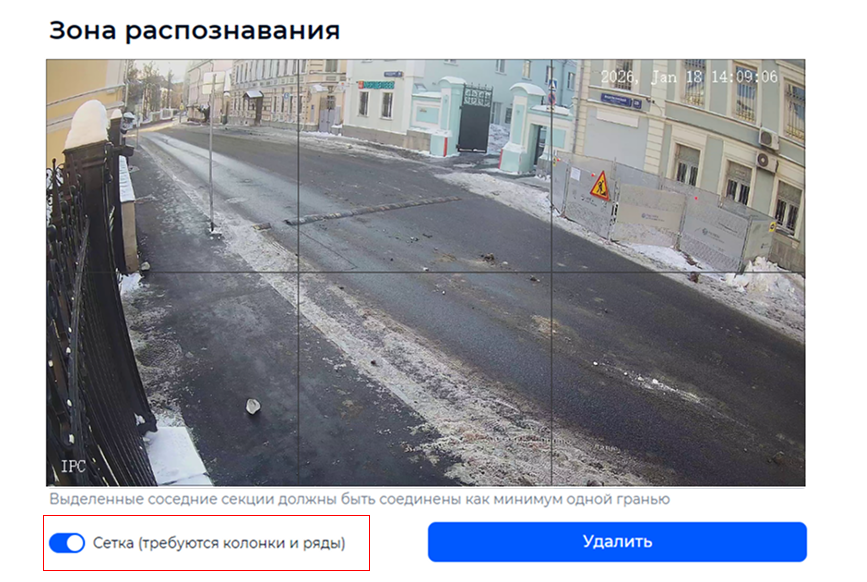
2․ Подтвердите создание зоны: Для завершения создания зоны распознавания нажмите на первую вершину многоугольника или выберите нужные ячейки сетки. Все соседние секции должны быть соединены как минимум одной гранью.
3․ Сохраните зону распознавания: Нажмите кнопку «Сохранить» под превью. Для сброса созданного многоугольника или выбранных ячеек сетки нажмите «Удалить».
4․ Укажите название зоны: Введите название зоны распознавания в поле «Наименование зоны распознавания». Оно может содержать от 1 до 255 символов и включать буквы, цифры и символы.
5․ Выберите цвет зоны: Выберите цвет для зоны распознавания или оставьте цвет по умолчанию. Цвет можно выбрать из предложенного списка или ввести HEX код.
6․ Завершите создание зоны: Для завершения операции нажмите кнопку «Сохранить» внизу формы. Чтобы отменить изменения, нажмите [Esc] на клавиатуре или кликните левой кнопкой мыши в области вокруг окна.
Удаление зоны распознавания#
Удаление зоны распознавания выполняется нажатием кнопки  в строке зоны, при этом появится предупреждение (Рисунок 108), в котором необходимо подтвердить операцию, нажав кнопку «Удалить» или отменить действие через кнопку «Отмена».
в строке зоны, при этом появится предупреждение (Рисунок 108), в котором необходимо подтвердить операцию, нажав кнопку «Удалить» или отменить действие через кнопку «Отмена».
Удаление невозможно, если зона используется в обработчике.
Массовое редактирование настроек камер#
С помощью кнопки «Массовое редактирование» можно отредактировать настройки сразу для нескольких камер, использующих один тип источника (Рисунок 109).
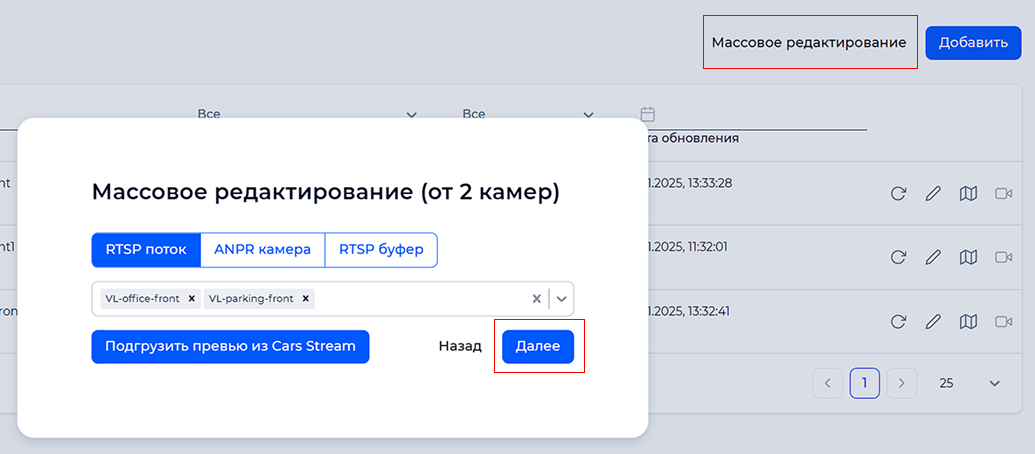
При нажатии на кнопку откроется окно, в котором необходимо выбрать камеры:
1․ Выберите тип камеры (тип источника): RTSP поток, Anpr камера или RTSP буфер. Можно выбрать только один тип источника. 2․ В выпадающем меню выберите камеры (не менее двух), использующих выбранный тип источника.
При нажатии на кнопку «Подгрузить превью из Cars Stream» будет создана задача на подгрузку превью из Cars Stream для всех выбранных камер.
После того как выбраны нужные камеры, нажмите кнопку «Далее», чтобы продолжить и задать необходимые настройки для выбранных камер.
После нажатия на кнопку «Далее» откроется отдельная страница с блоками настроек камер, соответствующих выбранному типу источника. Все описания параметров подробно приведены выше в подразделе Настройки камеры (Рисунок 110).
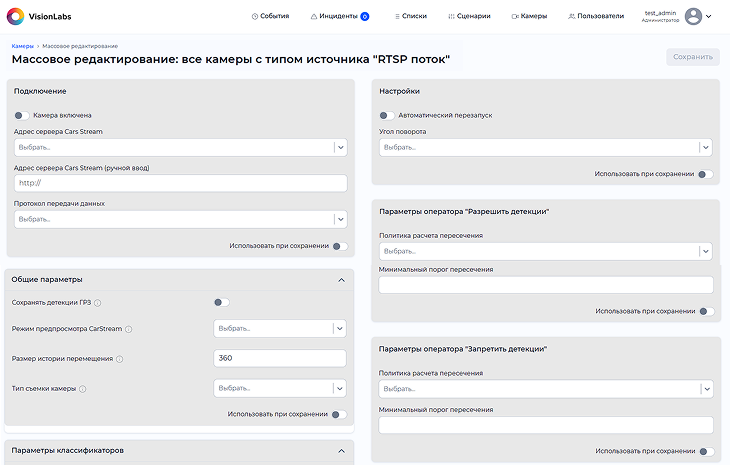
Вы можете настроить параметры в каждом подразделе, но для применения изменений необходимо перевести переключатель в положение «On» для выбранного вами подраздела.
После того как все параметры настроены, нажмите кнопку «Сохранить» в правом верхнем углу, чтобы применить изменения.
Перезапуск камеры#
В случаях, когда камера отключилась из-за ошибки (индикатор статуса имеет красный цвет), администратор имеет возможность перезапустить камеру в ручном режиме. Кнопка перезапуска располагается в строке камеры.
При перезапуске камеры происходит повторное подключение к источнику с параметрами, указанными в параметрах камеры.
Редактирование камеры#
Для редактирования камеры необходимо нажать на  в строке камеры.
в строке камеры.
Откроется окно формы настроек камеры, в котором можно изменить любые параметры.
Удаление камеры#
Удаление камеры можно произвести только при редактировании камеры. Кнопка удаления располагается вверху страницы камеры.
Необходимо нажать кнопку «Удалить», при этом появится предупреждение (Рисунок 111), в котором необходимо подтвердить операцию, нажав кнопку «Удалить» или отменить действие через кнопку «Отмена».
Просмотр расположения камеры#
Для просмотра расположения камеры на карте необходимо нажать на в строке камеры.
При этом в веб-браузере открывается окно сайта Яндекс.Карты (Рисунок 112). В окне отображается маркер расположения камеры на карте, указаны координаты и адрес, соответствующий данным координатам.
Привязка камеры к геолокации происходит с помощью интерфейса администратора и описана в документе «CARS_Analytics. Руководство администратора».
Просмотр видеопотока#
Пользователю доступна возможность просмотра видеопотока с камеры в режиме реального времени. Просмотр используется для мониторинга и отладки работы камеры и обработки видеопотока.
Доступны следующие режимы просмотра видеопотока: - Простой – режим предпросмотра, на котором отображаются только BBox детектированных объектов; - Интерактивный – режим предпросмотра, на котором отображаются BBox детектированных объектов и распознанные атрибуты
По умолчанию предпросмотр видеопотока недоступен, поскольку в настройках параметров камеры в блоке «Основные параметры → Режим предпросмотра потока» установлено значение «Отключено» (Рисунок 113). Чтобы включить предпросмотр, в этом блоке выберите один из доступных режимов («Простой» или «Интерактивный») и сохраните изменения.
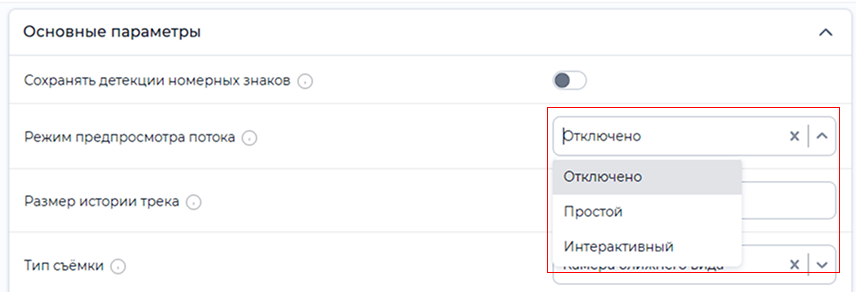
В этом же блоке можно в любой момент изменить режим предпросмотра или отключить предпросмотр.
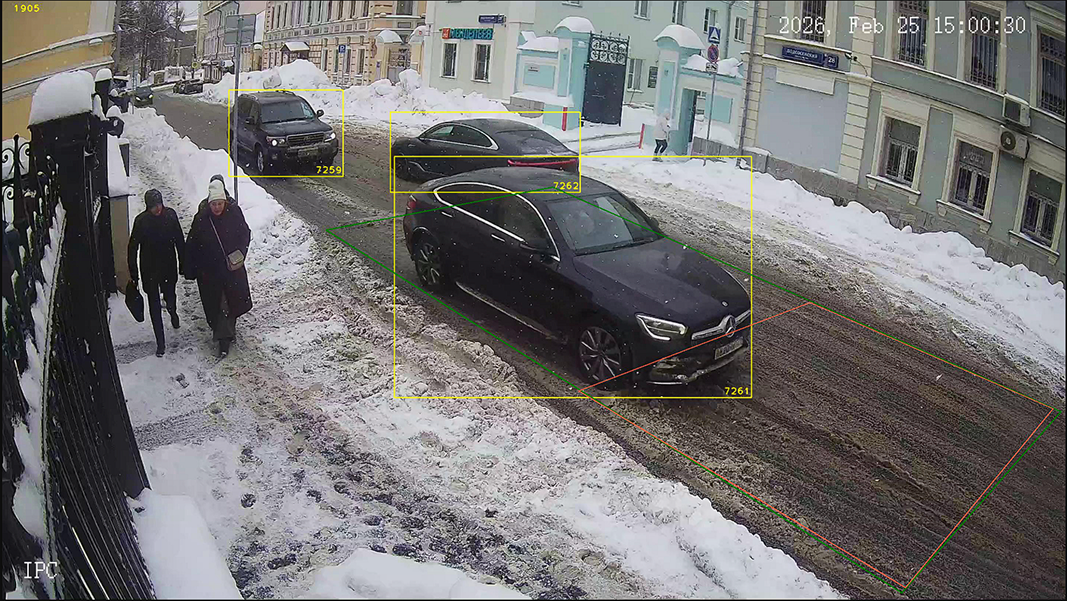
Для просмотра обрабатываемого видеопотока в разделе «Камеры» необходимо нажать на в строке нужной камеры (Рисунок 114). В веб-браузере открывается окно, где в режиме реального времени CARS_Stream производит детекцию и слежение за объектами в зоне регистрации. Границы кадра определяются настройками зоны детекции.

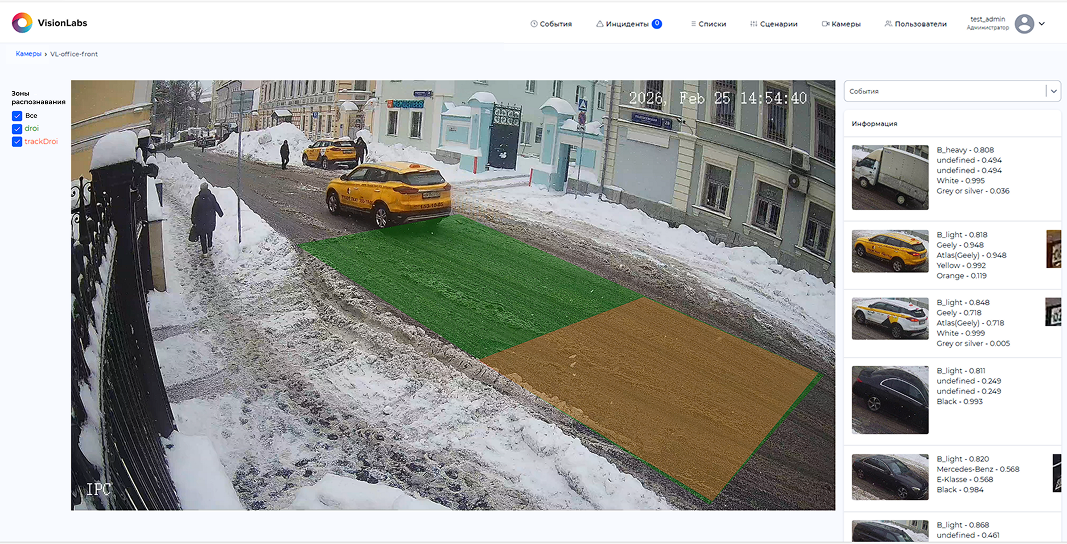
Пример простого режима предпросмотра (Рисунок 115). В этом режиме отображаются BBox детектированных объектов, а также отрисовываются созданные зоны.
Пример интерактивного режима предпросмотра (Рисунок 116). В этом режиме через чекбоксы можно включать и отключать отображение зон, настроенных для камеры, а также переходить в карточку события/инцидента по клику на соответствующий элемент в предпросмотре.