Раздел «Сценарии»#
Сценарии необходимы для формирования событий и инцидентов. Для сценария должен быть задан обработчик. Настройка сценариев и обработчиков происходит в разделе «Сценарии».
Общий вид раздела «Сценарии» (Рисунок 42).
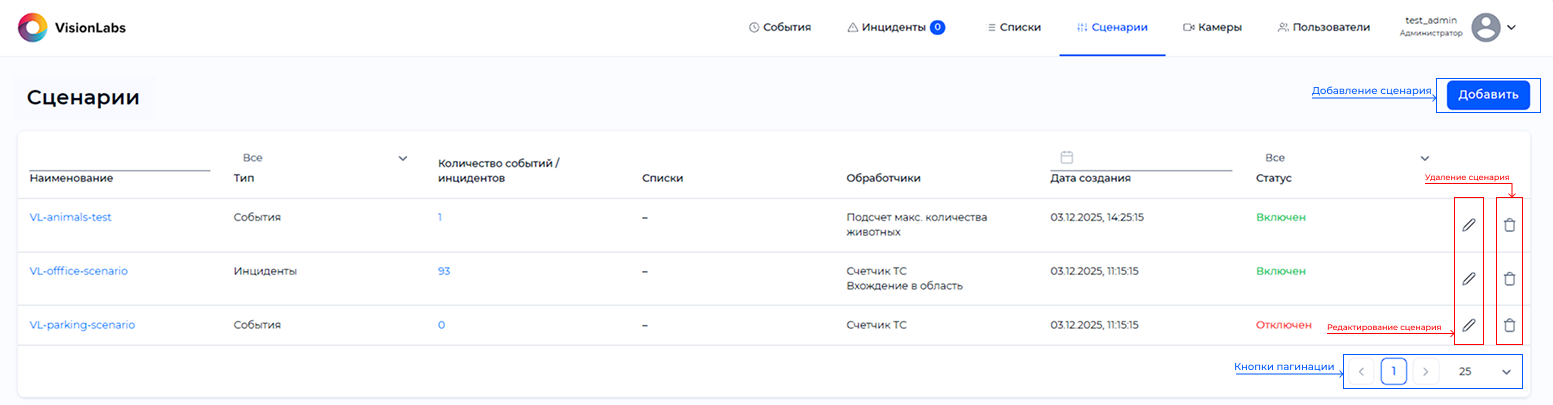
Основной элемент интерфейса этого раздела – таблица со сценариями. Таблица включает в себя следующие колонки:
- Наименование – название сценария;
- Тип – регистрируются ли в рамках сценария события или инциденты;
- Количество – количество зафиксированных регистраций (событий или инцидентов);
- Списки – список, с которым сравниваются атрибуты ТС и ГРЗ;
- Обработчики – название обработчика, используемого для сценария;
- Дата создания – время и дата создания сценария;
- Статус – статус активности сценария.
Поиск и фильтрация возможны по колонкам «Наименование», «Дата создания» и «Статус».
Создавать, наполнять, изменять и удалять сценарии может только Администратор.
Создание и редактирование сценария#
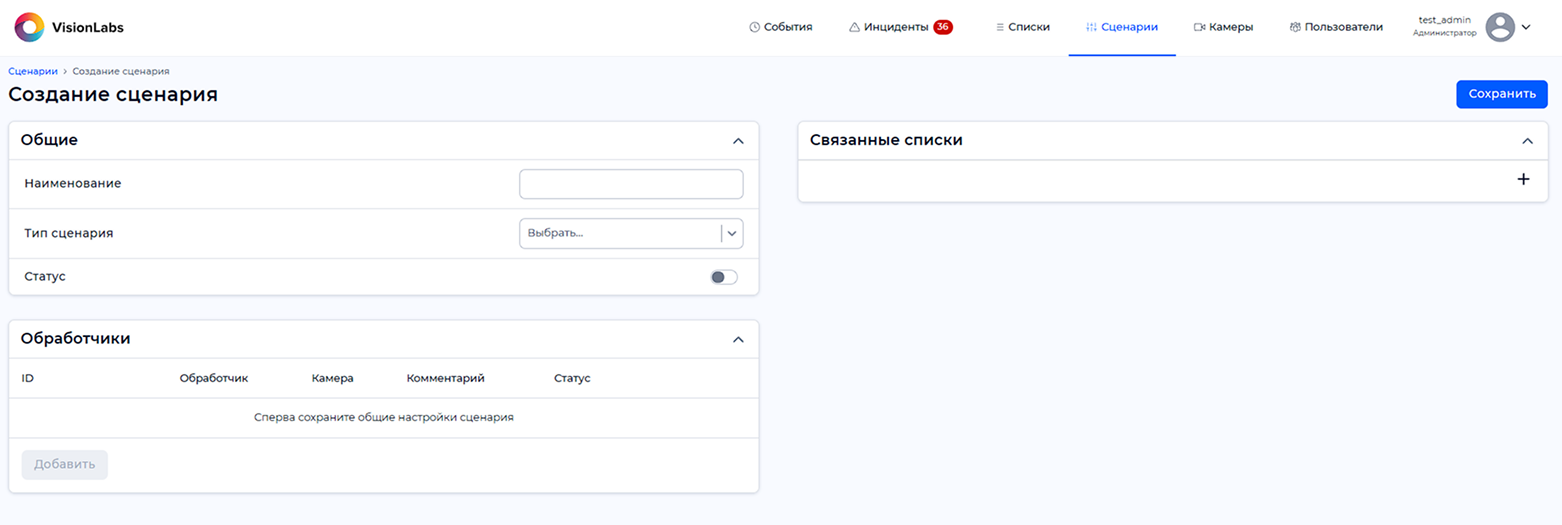
Для создания нового сценария необходимо нажать кнопку «Добавить».
Общий вид страницы создания сценария (Рисунок 43).
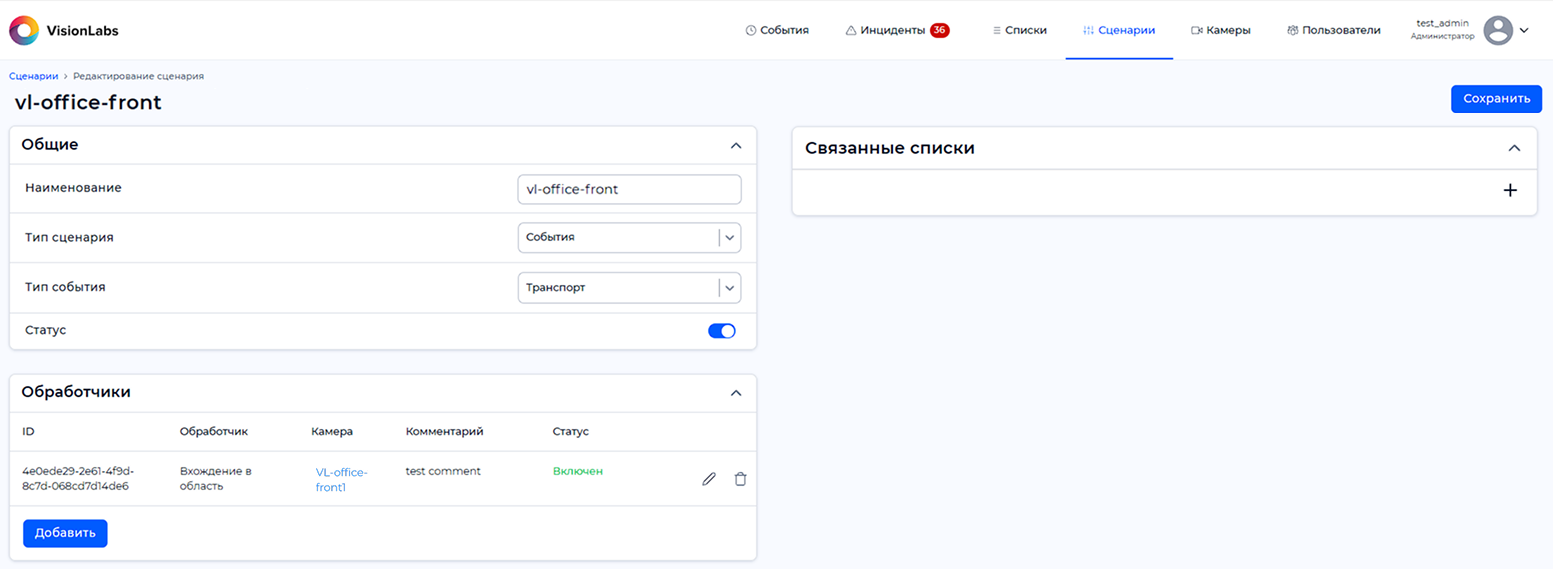
Для редактирования сценария необходимо нажать на  в строке сценария, при этом откроется страница редактирования сценария (Рисунок 44).
в строке сценария, при этом откроется страница редактирования сценария (Рисунок 44).
Описание наполнения страницы создания и настройки сценариев приведено в Таблице 13.
Таблица 13. Параметры создания и настройки сценария
| Название | Описание | Возможные значения |
|---|---|---|
| Общие | ||
| Наименование | Поле для ввода имени сценария | Может состоять из 1–255 знаков и содержать буквы, цифры и символы |
| Тип сценария | Тип сценария | - События; |
| - Инциденты | ||
| Тип события | Появляется только после выбора «События» в качестве типа сценария | - Возгорание – детекция возгорания; |
| - Животное – детекция животных; | ||
| - Пешеход – детекция пешеходов; | ||
| - Транспорт – детекция ТС | ||
| Тип инцидента | Появляется только после выбора «Инциденты» в качестве типа сценария | - Информационный – инцидент, не требующий отдельного рассмотрения; |
| - Тревожный – инцидент, требующий отдельного рассмотрения | ||
| Статус | Статус активности сценария | - Включен; |
| - Выключен | ||
| Обработчики | ||
| Обработчик | Обработчик определяет, по какому принципу будет обрабатываться кадр и сохраняться как событие или инцидент | Настройка обработчика описана в разделе Обработчики |
| Связанные списки | ||
| Список | Список, в котором будут распознанные ТС. Если все атрибуты записи списка совпадают с атрибутами ТС и ГРЗ, то создается событие или инцидент. Чтобы исключить из распознавания ТС и ГРЗ, которые уже есть в списке, нужно активировать переключатель «Кроме» | Списки, созданные Администратором. Подробнее в разделе Списки |
Для сохранения сценария необходимо нажать на кнопку «Сохранить» в правом верхнем углу.
Удаление сценария#
Для удаления сценария необходимо нажать  в строке сценария, при этом появится предупреждение (Рисунок 45), в котором необходимо подтвердить операцию, нажав кнопку «Удалить».
в строке сценария, при этом появится предупреждение (Рисунок 45), в котором необходимо подтвердить операцию, нажав кнопку «Удалить».
Обработчики#
В CARS_Analytics доступны следующие обработчики:
| Обработчик | Описание |
|---|---|
| Вхождение в область | Распознавание атрибутов ТС и ГРЗ при вхождении в зону |
| Пропускной пункт | Распознавание атрибутов ТС и ГРЗ при остановке в зоне |
| Движение между зонами | Распознавание атрибутов ТС и ГРЗ при движении ТС между заданными зонами |
| Вхождение пешехода в область | Детекция человека при вхождении в заданную зону |
| Вхождение животного в область | Детекция животного при вхождении в заданную зону |
| Подсчет максимального количества животных | Подсчет количества животных в зоне относительно предыдущего bestshot (например, когда собирается стая собак) |
| Расчет скорости | Расчет скорости ТС между заданными зонами |
| ANPR камера | Распознавание атрибутов ТС и ГРЗ c помощью ANPR камеры |
| Вхождение ГРЗ в область | Распознавание атрибутов ГРЗ при вхождении в зону |
| Подсчет ТС | Подсчет количества ТС в заданной зоне |
| Счетчик ТС | Подсчет количества ТС в зоне относительно предыдущего bestshot (например, занятость парковочных мест) |
| Обнаружение дыма и огня | Обнаружение возгораний в заданной зоне |
| Отслеживание дыма и огня | Отслеживание возгораний в заданной зоне |
| Покадровый обработчик | Обработка кадров с видеокамеры через заданный интервал 1 кадр каждые X мсек (например, проезд через шлагбаум) |
| Движение в зоне | Отслеживание движения ТС в заданных областях |
| Саботаж | Обнаружение изменений в области наблюдения: сдвиг и перекрытие объектива |
Уведомления об устаревших обработчиках
В системе предусмотрены уведомления, информирующие о наличии устаревших обработчиков. Если обработчик заблокирован, его создание становится невозможным. В случае, если обработчик больше не поддерживается или требует замены, рядом с ним появляется иконка восклицательного знака, и при наведении на неё отображается специальное уведомление (Рисунок 46).
Возможные уведомления, которые могут появиться рядом с обработчиком:
- «Обнаружены устаревшие обработчики» — жёлтая иконка восклицательного знака. Уведомление сообщает, что в системе имеются устаревшие обработчики, требующие проверки или замены.
- «Больше не поддерживается, необходимо заменить на новую версию» — жёлтая иконка восклицательного знака. Это уведомление информирует, что обработчик больше не поддерживается и его следует заменить на актуальную версию для корректной работы системы.
- «Больше не поддерживается, необходимо удалить» — красная иконка восклицательного знака. Уведомление указывает, что обработчик полностью утратил поддержку и должен быть удалён, так как его дальнейшее использование невозможно.

Вхождение в область#
Обработчик Вхождение область необходим для создания события или инцидента при пересечении ТС области для пересечения с заданным порогом.
Настройка параметров обработчика «Вхождение в область» выполняется в окне настройки обработчика после того, как тип обработчика будет установлен как «Вхождение в область» (Рисунок 47).
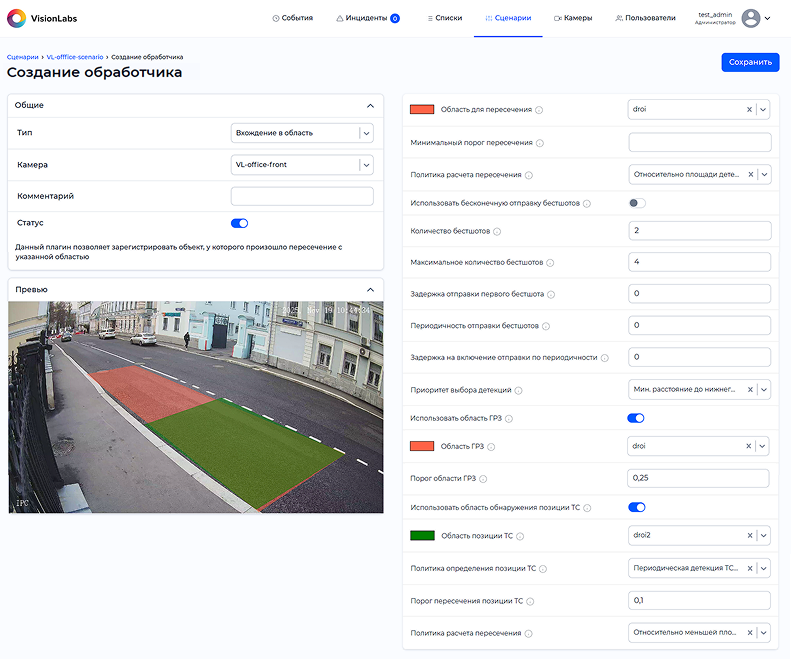
Параметры обработчика приведены в Таблице 14.
Таблица 14. Параметры обработчика «Вхождение в область»
| Название | Описание | Возможные значения |
|---|---|---|
| Общие | ||
| Тип | Выпадающий список с обработчиками, которые отвечают за детектирование и агрегацию информации для данного сценария | Доступные обработчики (подробнее в начале раздела Обработчики) |
| Камера | Камера, с которой будут получены кадры видеопотока для работы обработчика | Камеры, добавленные в систему |
| Комментарий | Комментарий пользователя | - |
| Статус | Значение активности обработчика | On/Off |
| Настройки камеры и зон распознавания | ||
| Область для пересечения | Выпадающий список для выбора зоны, при попадании ТС в которую выдается лучший кадр | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Камеры |
| Минимальный порог пересечения | Порог пересечения зоны и детекции ТС, при превышении которого система считает, что ТС находится в зоне. При превышении установленного порога система выдает лучший кадр | 0.01…1.00 |
| Политика расчёта пересечения | Выпадающий список, задающий, относительно какой площади считать процент пересечения ТС с выбранной зоной: зона (площадь пересечения/площадь зоны), детекция ТС (площадь пересечения/площадь детекции) или меньшая из площадей (площадь пересечения/min(площади зоны, площади детекции)) | - Относительно площади зоны; |
| - Относительно площади детекции; | ||
| - Относительно меньшей площади | ||
| Использовать бесконечную отправку бестшотов | Включение функции отправки неограниченного количества bestshots (Параметры «Количество бестшотов» и «Максимальное количество бестшотов» не будут учитываться, а значение в пункте «Периодичность отправки бестшотов» должно быть больше 0) | On/Off |
| Количество бестшотов | Максимальное количество лучших кадров (бестшотов) ТС с ГРЗ, которое может быть выдано для трека ТС. Чем больше будет собрано лучших кадров, тем точнее будет выданная информация по атрибутам ТС. Увеличение количества бестшотов приводит к увеличению утилизации процессора | 1…N |
| - 1 – высокая вероятность получения неверных результатов распознавания | ||
| - N – время выбора лучшего кадра увеличивается, но качество выше | ||
| Максимальное количество бестшотов | Количество бестшотов – это максимальное количество ТС с ГРЗ. Максимальное количество бестшотов – это максимальное количество ТС с ГРЗ и без ГРЗ для одного трека. Максимальное количество бестшотов - (минус) Количество бестшотов = Максимальное количество бестшотов ТС без ГРЗ. Значение данного параметра должно быть больше или равно значению параметра «Количество бестшотов» | 1…10000 |
| - 1 – высокая вероятность получения неверных результатов распознавания из-за низкого качества лучшего кадра | ||
| - 10000 – время выбора лучшего кадра увеличивается, но качество выше | ||
| Задержка отправки первого бестшота | Пауза между началом трека и отправкой первого кадра в CARS_Stream для определения лучшего кадра. Необходимо увеличивать паузу, если ТС в первые секунды трека может быть не в оптимальном ракурсе | 0…10000 |
| - 0 – нет задержки | ||
| - 1…10000 – пауза в миллисекундах | ||
| Периодичность отправки бестшотов | Периодичность отправки лучших кадров по треку. Необходимо увеличивать паузу, чтобы ТС на кадрах было детектировано с разных ракурсов. Набор из лучших кадров трека позволяет повысить вероятность правильного распознавания атрибутов ТС | 0…60000 |
| - 0 – нет задержки | ||
| - 1…60000 – пауза в миллисекундах | ||
| Задержка на включение отправки по периодичности | Пауза перед переходом к режиму отправки бестшотов с заданной периодичностью. В течение этой паузы поиск бестшота выполняется на каждом кадре; после истечения — кадры отправляются с интервалом, указанным в «Периодичность отправки бестшотов». Параметр действует только если «Периодичность отправки бестшотов» > 0. | 0…10000 |
| - 0 – нет задержки | ||
| - 1…10000 – пауза в миллисекундах | ||
| Приоритет выбора детекций | Выбор алгоритма для отбора наилучших кадров | - Мин. расстояние до нижнего края – лучшей детекцией считается детекция, находящаяся ближе всего к нижней границе кадра; |
| - Мин. область детекции – лучшей детекцией считается детекция с минимальной площадью; | ||
| - Макс. область детекции – лучшей детекцией считается детекция с максимальной площадью; | ||
| - Мин. ID кадра – лучшей детекцией считается детекция с минимальным ID кадра, т.е. детекция при «входе» объекта в кадр; | ||
| - Макс. ID кадра – лучшей детекцией считается детекция с максимальным ID кадра, т.е. детекция при «выходе» объекта из кадра; | ||
| - Мин. пересечение – лучшей детекцией считается детекция с минимальной долей пересечения с областью для пересечения; | ||
| - Макс. пересечение – лучшей детекцией считается детекция с максимальной долей пересечения с областью для пересечения | ||
| Использовать область ГРЗ | Использование дополнительной зоны распознавания для работы с частью дороги, в которой ГРЗ будет виден лучше всего | On/Off |
| Рекомендуется использовать: | ||
| - Если есть участок пути, где ТС замедляется и номер меньше всего смазывается; | ||
| - Если камера установлена так, что на части трека внутри зоны распознавания ГРЗ не видно и необходимо явно указать место фиксации ГРЗ | ||
| Область ГРЗ | Выпадающий список для выбора зоны распознавания ГРЗ. Система распознает ГРЗ только в случае попадания BBox ГРЗ в данную зону | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Камеры |
| Порог области ГРЗ | Порог пересечения зоны и BBox ГРЗ, при превышении которого система считает, что ГРЗ находится в данной зоне | 0.01…1.00 |
| Использовать область обнаружения позиции ТС | Включение использования области отслеживания позиции | On/Off |
| Область позиции ТС | Выпадающий список для выбора зоны позиции ТС. ТС будет зарегистрировано только в случае пересечения позиции ТС с заданной зоной | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Камеры |
| Политика определения позиции ТС | Выбор алгоритма оценки позиции ТС и проверки нахождения в зоне | - Периодическая детекция ТС в зоне — периодическая проверка пересечения позиции ТС и зоны |
| - Первая детекция ТС в зоне — проверка пересечения позиции ТС и зоны только для первой детекции | ||
| Порог пересечения позиции ТС | Порог по пересечению позиции ТС с заданной зоной. Для определения попадания ТС в зону рассчитывается процент попадания позиции ТС в зону. Если рассчитанный процент больше порога, то считается, что ТС находится в зоне, после чего оно регистрируется | 0.01…1.00 |
| Политика расчёта пересечения | Выпадающий список, задающий, относительно какой площади считать процент пересечения ТС с выбранной зоной: зона (площадь пересечения/площадь зоны), детекция ТС (площадь пересечения/площадь позиционирования) или меньшая из площадей (площадь пересечения/min(площади зоны, площади позиционирования)) | - Относительно площади зоны; |
| - Относительно площади детекции; | ||
| - Относительно меньшей площади |
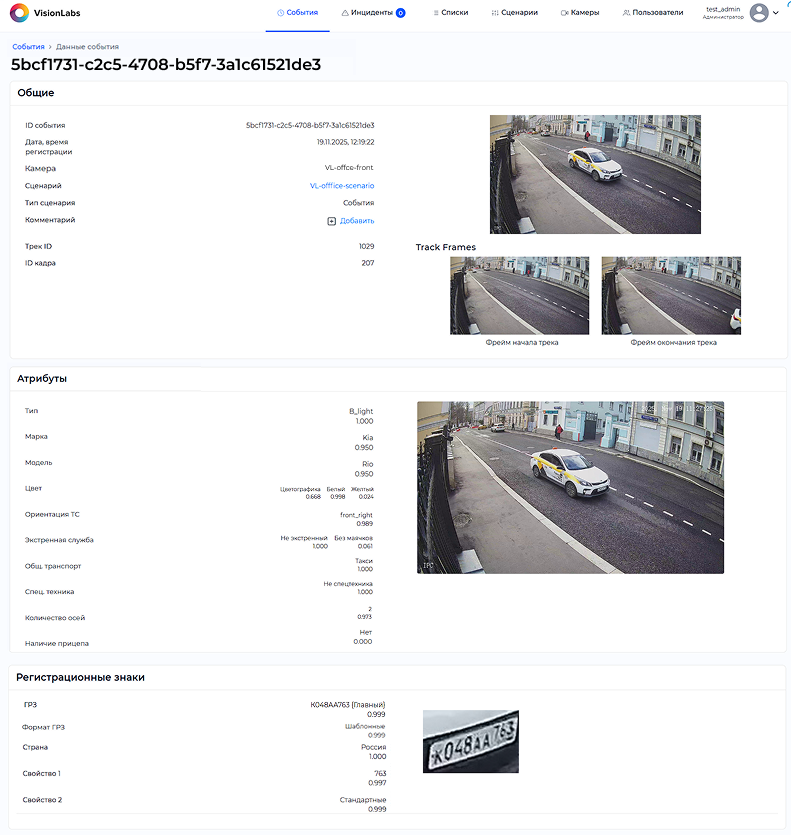
Результаты обработчика «Вхождение в область» в выбранной области наблюдения отображаются в карточке события или инцидента (Рисунок 48).
Цели использования обработчика приведены в Таблице 15.
Таблица 15. Описание целей использования обработчика «Вхождение в область»
| Цель использования | Фиксируемый объект | Важные параметры для этой цели |
|---|---|---|
| Журналирование проездов всех ТС на дороге или по полосам (поиск, анализ, учет и т. п.) | ТС | - камера |
| - область для пересечения | ||
| - минимальный порог пересечения | ||
| Примечание: Область для пересечения должна быть выбрана таким образом, чтобы ТС было видно полностью и без перекрытий | ||
| ГРЗ | - камера | |
| - область для пересечения | ||
| - минимальный порог пересечения | ||
| Примечание: Область для пересечения должна быть выбрана таким образом, чтобы ГРЗ было видно целиком, отчетливо и без перекрытий | ||
| Фиксация правонарушений ПДД – выезд на выделенную полосу движения, выезд на тротуар, въезд в запретную зону и т.д. | ТС в запретной зоне и ГРЗ | - камера |
| - область для пересечения | ||
| - минимальный порог пересечения | ||
| - полные кадры | ||
| Примечание: Камера должна быть установлена так, чтобы запрещенная зона была в кадре |
Примеры использования обработчика с заданными областями для пересечения приведены в таблице 16.
Таблица 16. Примеры работы обработчика
| Описание | Изображение |
|---|---|
| Журналирование проездов ТС | 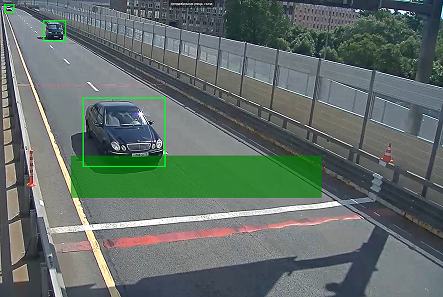 |
| Подсчет ТС по полосам. 1 полоса – 1 обработчик | 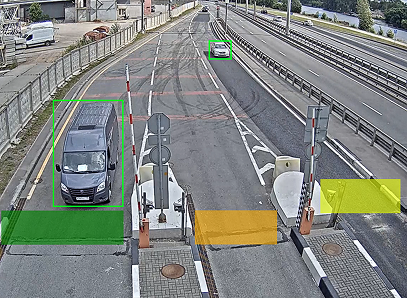 |
| Фиксация правонарушений ПДД – выезд на выделенную полосу движения, въезд в запретную зону и т.д. | 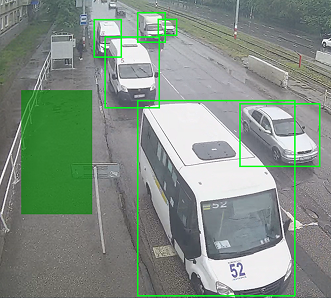 |
Пример использования зоны движения и зоны ГРЗ (Рисунок 49).
| Элемент | Описание |
|---|---|
| BBox | BBox ТС и ГРЗ, координаты и размер которого будут сравниваться с зонами |
 |
Область для пересечения |
 |
Область движения |
 |
Область ГРЗ |
В данном примере ТС будет зафиксировано только после проезда преграды в виде дорожного знака для исключения перекрытия ГРЗ ТС стойкой знака. Лучший кадр ГРЗ будет сформирован только при нахождении ГРЗ в области ГРЗ.
Пропускной пункт#
Обработчик «Пропускной пункт» необходим для создания события или инцидента при остановке ТС в заданной зоне, например на парковке или в зоне досмотра.
Настройка параметров обработчика «Пропускной пункт» выполняется в окне настройки обработчика после того, как тип обработчика будет установлен как «Пропускной пункт» (Рисунок 50).
Не рекомендуется использовать обработчик в местах, где может быть затруднено движение.
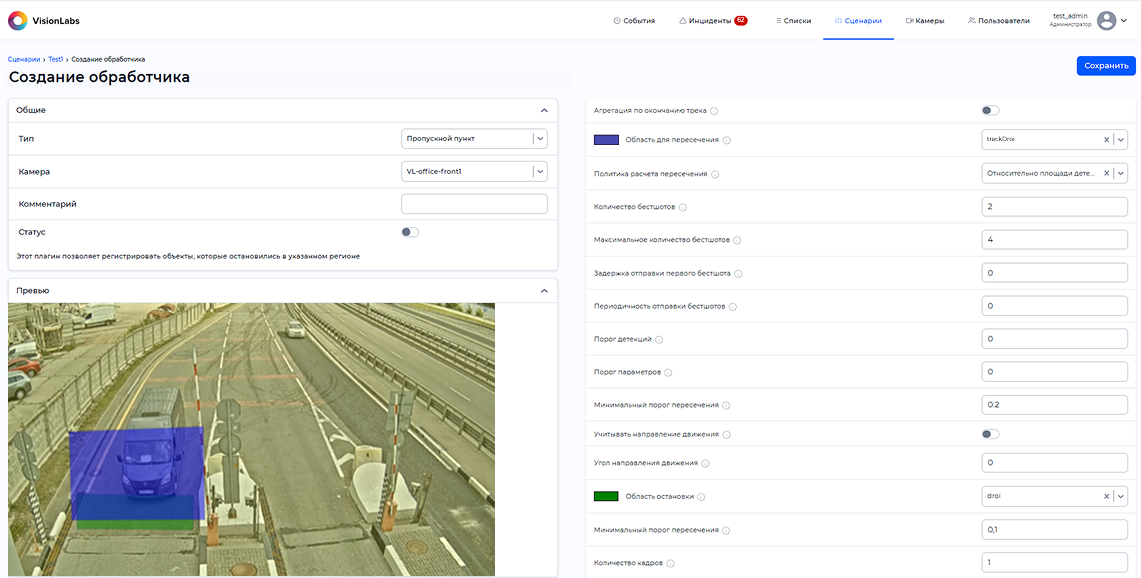
Детекция и трекинг ТС и ГРЗ происходит при вхождении в «Область для пересечения». Формирование лучших кадров происходит только при остановке в «Области остановки».
ТС считается остановившимся при неизменном положение на кадре на протяжении заданного количества кадров, задается в поле «Количество кадров».
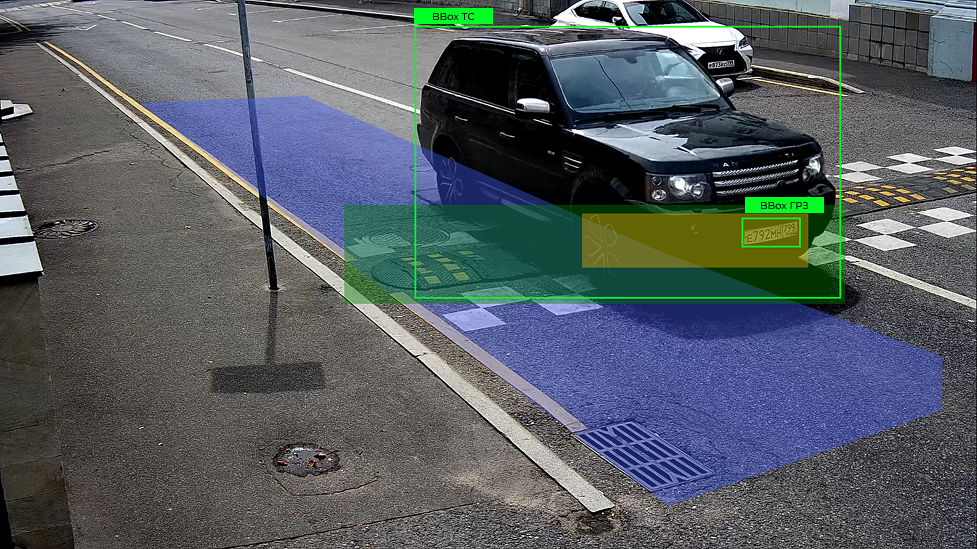
Пример распознавания ТС при работе обработчика «Пропускной пункт» (Рисунок 51).

| Элемент | Описание |
|---|---|
| BBox | BBox ТС, координаты и размер которого будут сравниваться с областью для пересечения |
|
Область для пересечения |
|
Область остановки |
В данном примере будут зафиксированы только те ТС, которые оставались неподвижными заданное количество кадров в «Области остановки». Лучшие кадры будут выбираться из детекций в «Области для пересечения».
Цели использования с необходимыми параметрами обработчика приведены в Таблице 17.
Таблица 17. Цели использования
| Цель использования | Фиксируемый объект | Важные параметры для этой цели |
|---|---|---|
| Контроль общественного транспорта и фиксация правонарушений ПДД | ТС | - камера |
| - область для пересечения | ||
| - минимальный порог пересечения | ||
| Примечание: Область для пересечения должна быть выбрана таким образом, чтобы ТС было видно полностью и без перекрытий | ||
| ГРЗ | - камера | |
| - область для пересечения | ||
| - минимальный порог пересечения | ||
| Примечание: Область для пересечения должна быть выбрана таким образом, чтобы ГРЗ был виден целиком, отчетливо и без перекрытий |
Примеры использования обработчика с выделенными областями для пересечения приведены в таблице 16.
Таблица 18. Примеры использования
| Описание | Изображение |
|---|---|
| Контроль общественного транспорта и фиксация правонарушений ПДД – остановка в неположенном месте, контроль автобусной остановки и т.д. | 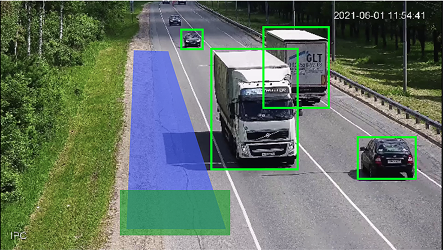 |
Параметры обработчика приведены в Таблице 17.
Таблица 19. Параметры обработчика «Пропускной пункт»
| Название | Описание | Возможные значения |
|---|---|---|
| Общие | ||
| Тип | Выпадающий список с обработчиками, которые отвечают за детектирование и агрегацию информации для данного сценария | Доступные обработчики (подробнее в начале раздела Обработчики) |
| Камера | Камера, с которой будут получены кадры видеопотока для работы обработчика | Камеры, добавленные в систему |
| Комментарий | Комментарий пользователя | - |
| Статус | Значение активности обработчика | On/Off |
| Настройки камеры и зон распознавания | ||
| Агрегация по окончании трека | Дополнительная проверка детекций на вхождение в зону при окончании трека, если при получении бестошота детекции не попали под условие обработчика | On/Off |
| Область для пересечения | Выпадающий список для выбора зоны, при попадании ТС в которую выдается лучший кадр | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Камеры |
| Политика расчёта пересечения | Выпадающий список, задающий, относительно какой площади считать процент пересечения ТС с выбранной зоной: зона (площадь пересечения/площадь зоны), детекция ТС (площадь пересечения/площадь детекции) или меньшая из площадей (площадь пересечения/min(площади зоны, площади детекции)) | - Относительно площади зоны; |
| - Относительно площади детекции; | ||
| - Относительно меньшей площади | ||
| Количество бестшотов | Максимальное количество лучших кадров (бестшотов) ТС с ГРЗ, которое может быть выдано для трека ТС. Чем больше будет собрано лучших кадров, тем точнее будет выданная информация по атрибутам ТС. Увеличение количества бестшотов приводит к увеличению утилизации процессора | 1…N |
| - 1 – высокая вероятность получения неверных результатов распознавания | ||
| - N – время выбора лучшего кадра увеличивается, но качество выше | ||
| Максимальное количество бестшотов | Количество бестшотов – это максимальное количество ТС с ГРЗ. Максимальное количество бестшотов – это максимальное количество ТС с ГРЗ и без ГРЗ для одного трека. Максимальное количество бестшотов - (минус) Количество бестшотов = Максимальное количество бестшотов ТС без ГРЗ. Значение данного параметра должно быть больше или равно значению параметра «Количество бестшотов» | 1…10000 |
| - 1 – высокая вероятность получения неверных результатов распознавания из-за низкого качества лучшего кадра | ||
| - 10000 – время выбора лучшего кадра увеличивается, но качество выше | ||
| Задержка отправки первого бестшота | Пауза между началом трека и отправкой первого кадра в CARS_Stream для определения лучшего кадра. Необходимо увеличивать паузу, если ТС в первые секунды трека может быть не в оптимальном ракурсе | 0…10000 |
| - 0 – нет задержки | ||
| - 1…10000 – пауза в миллисекундах | ||
| Периодичность отправки бестшотов | Периодичность отправки лучших кадров по треку. Необходимо увеличивать паузу, чтобы ТС на кадрах было детектировано с разных ракурсов. Набор из лучших кадров трека позволяет повысить вероятность правильного распознавания атрибутов ТС | 0…60000 |
| - 0 – нет задержки | ||
| - 1…60000 – пауза в миллисекундах | ||
| Порог детекций | Минимальное количество детекций ТС в рамках одного трека для сценария. Необходимо увеличить порог для уменьшения количества ложных событий | 0…10 |
| - 0 – отключение параметра | ||
| - 1 – Регистрация событий при получении 1 детекции. Высокая вероятность получения ложных событий | ||
| - 10 – Регистрация событий с минимум 10-ю детекциями. Высокая вероятность пропусков событий | ||
| Порог параметров | Минимальное количество распознанных атрибутов ТС (марка, модель, принадлежность к экстренной службе, спец. техника, общественный транспорт, тип ТС, страна, цвет) на одном лучшем кадре для срабатывания сценария. Необходимо увеличить порог для уменьшения количества ложных событий в системе | 0…10 |
| - 0 – все события/инциденты формируются, высокая вероятность появления ложных событий | ||
| - 10 – событие/инцидент формируется только при распознавании всех атрибутов ТС. Высокая вероятность пропусков событий | ||
| Минимальный порог пересечения | Порог по пересечению области с детекцией, чтобы считать что данное пересечение - «Вхождение в область», т.е. при превышении установленного порога будет сформировано событие/инцидент | 0.01…1.00 |
| Учитывать направление движения | Логическое значение, включающее учет направления движения. При выключенном значении направление движения ТС не учитывается | On/Off |
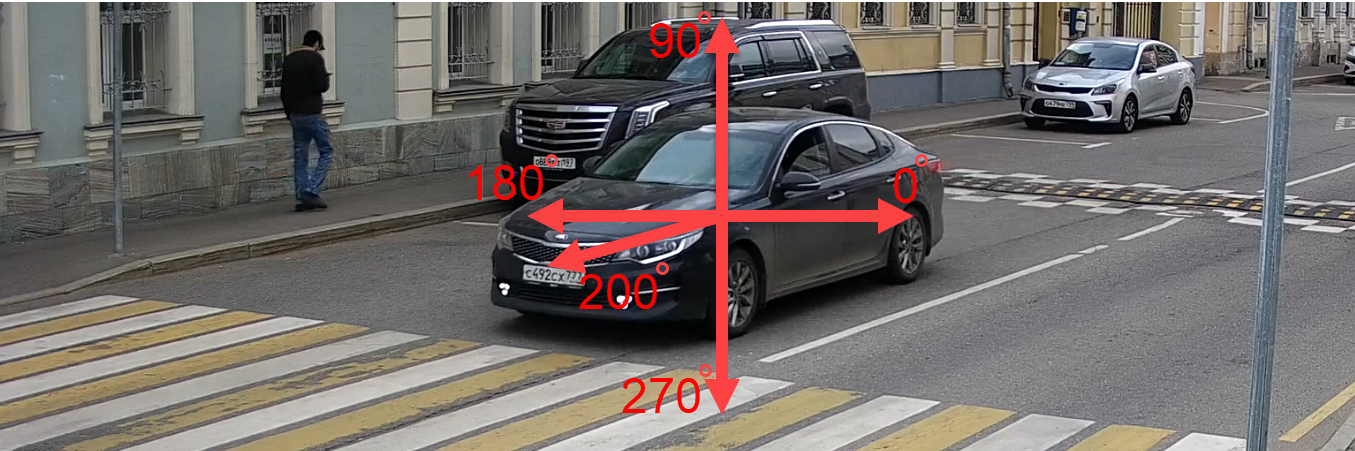
| Угол направления движения | Угол направления движения ТС относительно кадра в полярных координатах. Используется для разделения потоков движения, так как диапазон направлений движения ТС относительно заданного угла +/- 90 градусов | 0…360 |
| - 0 – движение ТС слева направо | ||
| - 90 – снизу вверх | ||
| - 180 – справа налево | ||
| - 270 – сверху вниз | ||
| Область остановки | Выпадающий список для выбора зоны распознавания, в которой проверяется факт остановки ТС | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Камеры |
| Минимальный порог пересечения | Порог по пересечению области с детекцией, чтобы считать что данное пересечение - «Область остановки», т.е. при превышении установленного порога будет сформировано событие/инцидент | 0.01…1.00 |
| Количество кадров | Минимальное количество кадров трека, на которых ТС не движется, для фиксации факта остановки ТС | 1…240 |
| - 1 – ТС должно находиться без движения ~1 секунду | ||
| - 240 – ТС должно находиться без движения ~20 секунд | ||
| Приоритет выбора детекций | Выбор алгоритма для отбора наилучших кадров | - Мин. расстояние до нижнего края – лучшей детекцией считается детекция, находящаяся ближе всего к нижней границе кадра; |
| - Мин. область детекции – лучшей детекцией считается детекция с минимальной площадью; | ||
| - Макс. область детекции – лучшей детекцией считается детекция с максимальной площадью; | ||
| - Мин. ID кадра – лучшей детекцией считается детекция с минимальным ID кадра, т.е. детекция при «входе» объекта в кадр; | ||
| - Макс. ID кадра – лучшей детекцией считается детекция с максимальным ID кадра, т.е. детекция при «выходе» объекта из кадра; | ||
| - Мин. пересечение – лучшей детекцией считается детекция с минимальной долей пересечения с областью для пересечения; | ||
| - Макс. пересечение – лучшей детекцией считается детекция с максимальной долей пересечения с областью для пересечения | ||
| Использовать область ГРЗ | Использование дополнительной зоны распознавания для работы с частью дороги, в которой ГРЗ будет виден лучше всего. Рекомендуется использовать: | On/Off |
| - Если есть участок пути, где ТС замедляется и номер меньше всего смазывается; | ||
| - Если камера установлена так, что на части трека внутри зоны распознавания ГРЗ не видно и необходимо явно указать место фиксации ГРЗ | ||
| Область ГРЗ | Выпадающий список для выбора зоны распознавания ГРЗ. Система распознает ГРЗ только в случае попадания BBox ГРЗ в данную зону | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Камеры |
| Порог области ГРЗ | Порог пересечения зоны и BBox ГРЗ, при превышении которого система считает, что ГРЗ находится в данной зоне | 0.01…1.00 |
Полярные координаты кадра (пример ТС, движущегося под углом 200°) (Рисунок 52).
Движение между зонами#
Обработчик «Движение между зонами» необходим для создания события или инцидента при проезде ТС через заданные зоны, например при движении по перекрестку или проезде через шлагбаум.
Настройка параметров обработчика «Движение между зонами» выполняется в окне настройки обработчика после того, как тип обработчика будет установлен как «Движение между зонами» (Рисунок 53).
Обработчик используется для фиксации ТС, пересекающих зоны кадра в заданной последовательности. Может использоваться, например, для фильтрации по направлению движения – встречное или попутное.
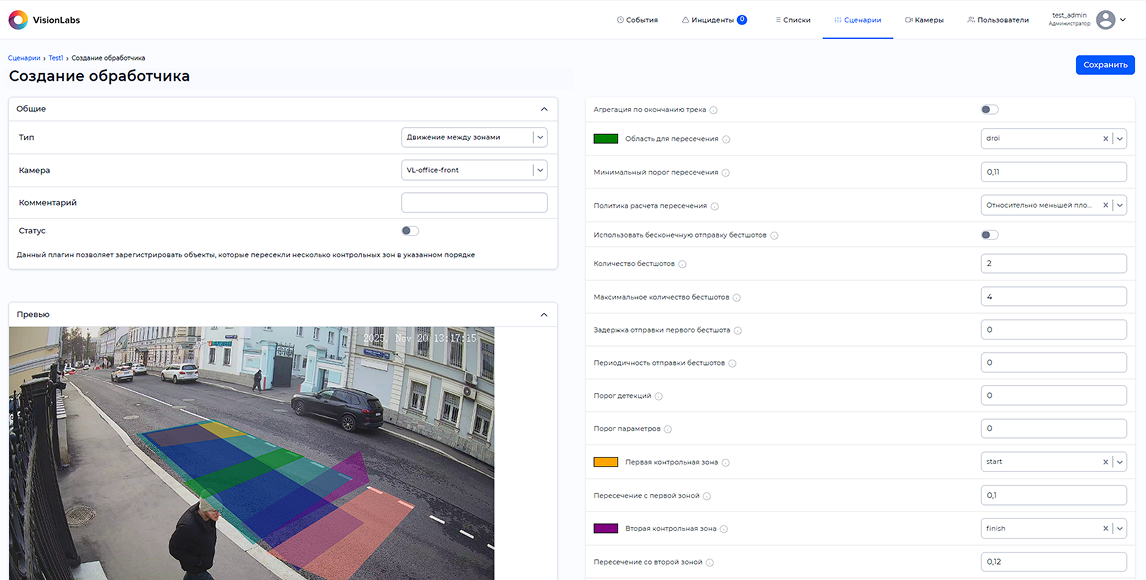
Детекция и трекинг ТС и ГРЗ происходит при вхождении в «Область для пересечения». Регистрация события происходит только при последовательном пересечении ТС «Первой контрольной зоны» и «Второй контрольной зоны» в рамках одного трека.
Пример работы обработчика «Движение между зонами» (Рисунок 54).
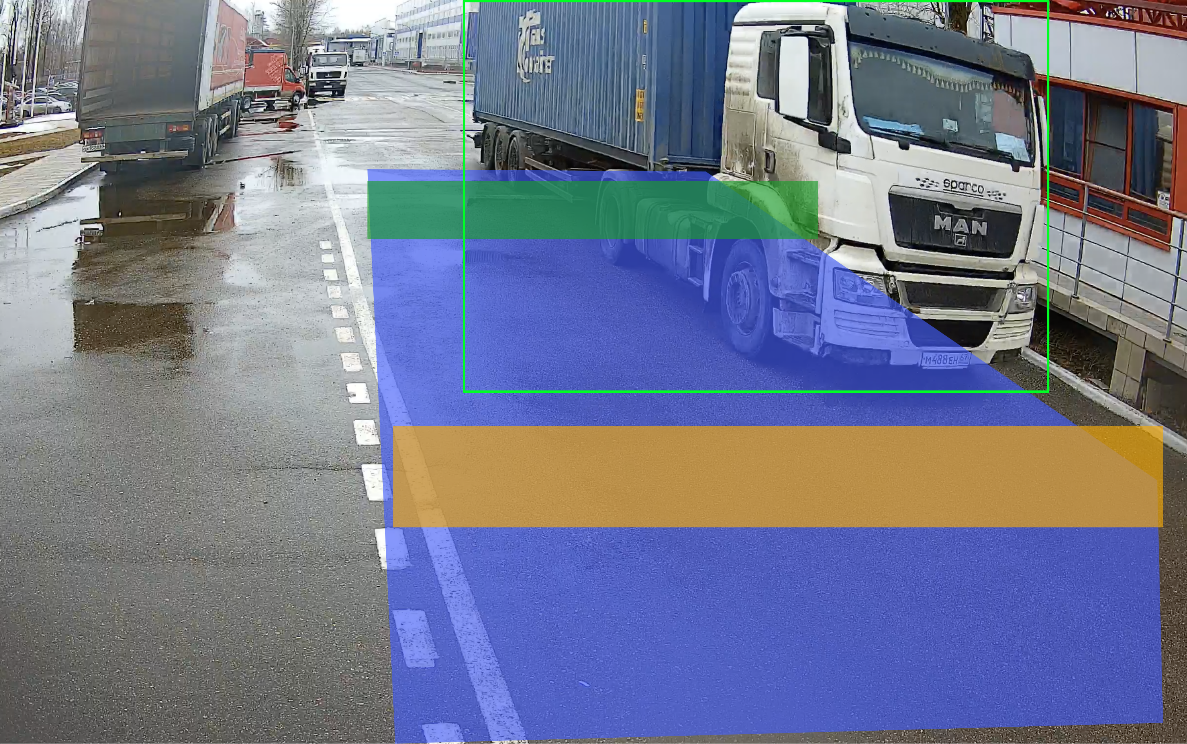
| Элемент | Описание |
|---|---|
| BBox | BBox ТС, координаты и размер которого будут сравниваться с областью для пересечения |
|
Область для пересечения |
|
Первая контрольная зона |
|
Вторая контрольная зона |
В данном примере будет создано событие только для ТС, движущихся поочередно через первую и вторую контрольную зоны, т.е. навстречу камере.
Цели использования с необходимыми параметрами обработчика приведены в Таблице 20.
Таблица 20. Цели использования обработчика «Движение между зонами»
| Цель использования | Фиксируемый объект | Важные параметры для этой цели |
|---|---|---|
| Определение направления движения – попутное, встречное, поворот, разворот ТС и ГРЗ | - камера | |
| - область для пересечения | ||
| - минимальный порог пересечения | ||
| - первая контрольная зона | ||
| - вторая контрольная зона | ||
| Примечание: Область для пересечения должна быть выбрана таким образом, чтобы ТС и ГРЗ было видно полностью на всем пути и без перекрытий (мост, туннели, строения) | ||
| Открытие шлагбаума | ГРЗ | - камера |
| - область для пересечения | ||
| - минимальный порог пересечения | ||
| - первая контрольная зона | ||
| - вторая контрольная зона | ||
| Примечание: Камера должна быть установлена так, чтобы шлагбаум не перекрывал зоны на кадре |
Примеры использования обработчика с заданной зоной распознавания и контрольными зонами движения приведены в Таблице 21.
Таблица 21. Примеры использования
| Описание | Изображение |
|---|---|
| Контроль движения ТС на перекрестках и т.д. |  |
| Открытие шлагбаума только для подъезжающих ТС |  |
Параметры обработчика приведены в Таблице 22.
Таблица 22. Параметры обработчика «Движение между зонами»
| Название | Описание | Возможные значения |
|---|---|---|
| Общие | ||
| Тип | Выпадающий список с обработчиками, которые отвечают за детектирование и агрегацию информации для данного сценария | Доступные обработчики (подробнее в начале раздела Обработчики) |
| Камера | Камера, с которой будут получены кадры видеопотока для работы обработчика | Камеры, добавленные в систему |
| Комментарий | Комментарий пользователя | - |
| Статус | Значение активности обработчика | On/Off |
| Настройки камеры и зон распознавания | ||
| Агрегация по окончании трека | Дополнительная проверка детекций на вхождение в зону при окончании трека, если при получении бестошота детекции не попали под условие обработчика | On/Off |
| Область для пересечения | Выпадающий список для выбора зоны, при попадании ТС в которую выдается лучший кадр | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Камеры |
| Минимальный порог пересечения | Порог пересечения зоны и детекции ТС, при превышении которого система считает, что ТС находится в зоне. При превышении установленного порога система выдает лучший кадр | 0.01…1.00 |
| Политика расчёта пересечения | Выпадающий список, задающий, относительно какой площади считать процент пересечения ТС с выбранной зоной: зона (площадь пересечения/площадь зоны), детекция ТС (площадь пересечения/площадь детекции) или меньшая из площадей (площадь пересечения/min(площади зоны, площади детекции)) | - Относительно площади зоны; |
| - Относительно площади детекции; | ||
| - Относительно меньшей площади | ||
| Использовать бесконечную отправку бестшотов | Включение функции отправки неограниченного количества бестшотов (Параметры «Количество бестшотов» и «Максимальное количество бестшотов» не будут учитываться, а значение в пункте «Периодичность отправки бестшотов» должно быть больше 0) | On/Off |
| - Off – использование параметров «Количество бестшотов» и «Максимальное количество бестшотов» | ||
| Количество бестшотов | Максимальное количество лучших кадров (бестшотов) ТС с ГРЗ, которое может быть выдано для трека ТС. Чем больше будет собрано лучших кадров, тем точнее будет выданная информация по атрибутам ТС. Увеличение количества бестшотов приводит к увеличению утилизации процессора | 1…N |
| - 1 – высокая вероятность получения неверных результатов распознавания | ||
| - N – время выбора лучшего кадра увеличивается, но качество выше | ||
| Максимальное количество бестшотов | Количество бестшотов – это максимальное количество ТС с ГРЗ. Максимальное количество бестшотов – это максимальное количество ТС с ГРЗ и без ГРЗ для одного трека. Максимальное количество бестшотов - (минус) Количество бестшотов = Максимальное количество бестшотов ТС без ГРЗ. Значение данного параметра должно быть больше или равно значению параметра «Количество бестшотов» | 1…10000 |
| - 1 – высокая вероятность получения неверных результатов распознавания из-за низкого качества лучшего кадра | ||
| - 10000 – время выбора лучшего кадра увеличивается, но качество выше | ||
| Задержка отправки первого бестшота | Пауза между началом трека и отправкой первого кадра в CARS_Stream для определения лучшего кадра. Необходимо увеличивать паузу, если ТС в первые секунды трека может быть не в оптимальном ракурсе | 0…10000 |
| - 0 – нет задержки | ||
| - 1…10000 – пауза в миллисекундах | ||
| Периодичность отправки бестшотов | Периодичность отправки лучших кадров по треку. Необходимо увеличивать паузу, чтобы ТС на кадрах было детектировано с разных ракурсов. Набор из лучших кадров трека позволяет повысить вероятность правильного распознавания атрибутов ТС | 0…60000 |
| - 0 – нет задержки | ||
| - 1…60000 – пауза в миллисекундах | ||
| Порог детекций | Минимальное количество детекций ТС в рамках одного трека для сценария. Необходимо увеличить порог для уменьшения количества ложных событий | 0…10 |
| - 0 – отключение параметра | ||
| - 1 – Регистрация событий при получении 1 детекции. Высокая вероятность получения ложных событий | ||
| - 10 – Регистрация событий с минимум 10-ю детекциями. Высокая вероятность пропусков событий | ||
| Порог параметров | Минимальное количество распознанных атрибутов ТС (марка, модель, принадлежность к экстренной службе, спец. техника, общественный транспорт, тип ТС, страна, цвет) на одном лучшем кадре для срабатывания сценария. Необходимо увеличить порог для уменьшения количества ложных событий в системе | 0…10 |
| - 0 – все события/инциденты формируются, высокая вероятность появления ложных событий | ||
| - 10 – событие/инцидент формируется только при распознавании всех атрибутов ТС. Высокая вероятность пропусков событий | ||
| Первая контрольная зона | Выпадающий список для выбора зоны, в которой проверяется пересечение BBox ТС для фиксации начальной контрольной точки | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Камеры |
| Пересечение с первой зоной | Минимальный процент пересечения детекции с «Первой контрольной зоной», необходимый для формирования события/инцидента | 0.01…100 |
| Вторая контрольная зона | Выпадающий список для выбора зоны, в которой проверяется пересечение BBox ТС для фиксации начальной контрольной точки | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Камеры |
| Пересечение со второй зоной | Минимальный процент пересечения детекции со «Второй контрольной зоной», необходимый для формирования события/инцидента. При превышении установленного порога будет зафиксировано пересечение | 0.01…100 |
| Минимальное количество пересечений с зоной | Минимальное количество пересечений со «Второй контрольной зоной», необходимое для формирования события. Увеличение значения помогает уменьшить количество ложных событий | 1…48 |
| Только первая, затем вторая | Отправка лучших кадров происходит при детекции ТС в первой зоне, если оно не попало во вторую, а после — только при попадании во вторую зону, независимо от нахождения в первой. Этот режим подходит для объектов с большими габаритами, например, автобусов или грузовиков. В один момент времени может быть активировано только одно правило | On/Off |
| Первая, затем вторая | Отправка лучших кадров происходит при детекции ТС в первой зоне, вне зависимости от попадания во вторую зону, а затем — только при попадании во вторую зону. Этот режим подходит для объектов с большими габаритами, таких как автобусы и грузовики. В один момент времени может быть активировано только одно правило | On/Off |
| Только первая, затем только вторая | Отправка лучших кадров происходит только при раздельном проезде ТС первой зоны, а затем второй. Зоны должны быть расположены так, чтобы ТС не находилось в двух зонах одновременно. В один момент времени может быть активировано только одно правило | On/Off |
| Приоритет выбора детекций | Выбор алгоритма для отбора наилучших кадров | - Мин. расстояние до нижнего края – лучшей детекцией считается детекция, находящаяся ближе всего к нижней границе кадра; |
| - Мин. область детекции – лучшей детекцией считается детекция с минимальной площадью; | ||
| - Макс. область детекции – лучшей детекцией считается детекция с максимальной площадью; | ||
| - Мин. ID кадра – лучшей детекцией считается детекция с минимальным ID кадра, т.е. детекция при «входе» объекта в кадр; | ||
| - Макс. ID кадра – лучшей детекцией считается детекция с максимальным ID кадра, т.е. детекция при «выходе» объекта из кадра; | ||
| - Мин. пересечение – лучшей детекцией считается детекция с минимальной долей пересечения с областью для пересечения; | ||
| - Макс. пересечение – лучшей детекцией считается детекция с максимальной долей пересечения с областью для пересечения | ||
| Использовать область ГРЗ | Использование дополнительной зоны распознавания для работы с частью дороги, в которой ГРЗ будет виден лучше всего | On/Off |
| Рекомендуется использовать: | ||
| - Если есть участок пути, где ТС замедляется и номер меньше всего смазывается; | ||
| - Если камера установлена так, что на части трека внутри зоны распознавания ГРЗ не видно и необходимо явно указать место фиксации ГРЗ | ||
| Область ГРЗ | Выпадающий список для выбора зоны распознавания ГРЗ. Система распознает ГРЗ только в случае попадания BBox ГРЗ в данную зону | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Камеры |
| Порог области ГРЗ | Порог пересечения зоны и BBox ГРЗ, при превышении которого система считает, что ГРЗ находится в данной зоне | 0.01…1.00 |
На Рисунках 55–57 представлены схемы, описывающие работу правил:
1․ Только первая, затем вторая (Рисунок 55);
На первом кадре происходит попадание в первую контрольную зону (Зона 1), а на втором – попадание во вторую контрольную зону (Зона 2) и последующее формирование лучшего кадра ТС и ГРЗ.
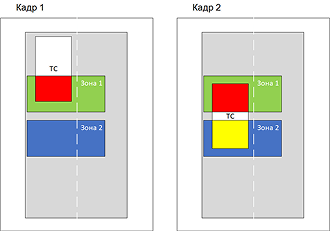
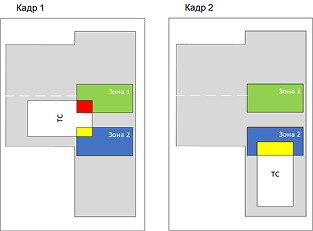
2․ Первая, затем вторая (Рисунок 56);
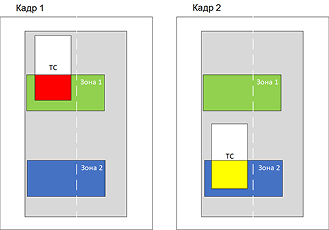
3․ Только первая, затем только вторая (Рисунок 57).
Вхождение пешехода в область#
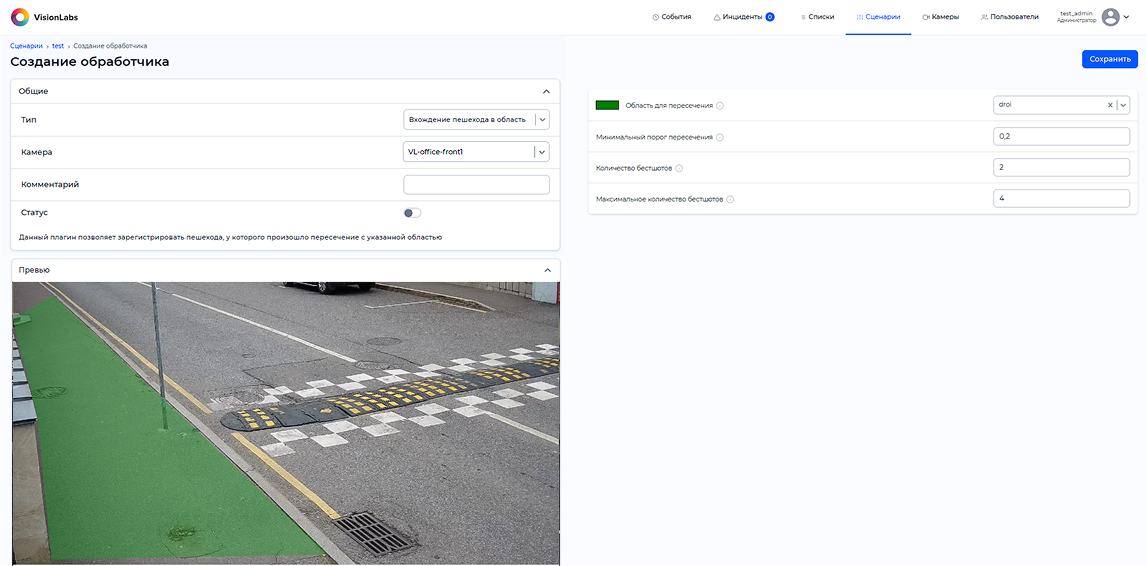
Обработчик «Вхождение пешехода в область» необходим для создания события или инцидента при пересечении человеком Области для пересечения с заданным порогом.
Настройка параметров обработчика «Вхождение пешехода в область» выполняется в окне настройки обработчика после того, как тип обработчика будет установлен как «Вхождение пешехода в область» (Рисунок 58).
Пример распознавания человека (Рисунок 59).

| Элемент | Описание | Площадь перекрытия Области для пересечения |
|---|---|---|
| BBox | BBox пешехода, координаты и размер которого будут сравниваться с Областью для пересечения | - |
|
Область для пересечения | - |
 |
Процент площади Области для пересечения, перекрытой BBox 1 | 0,6 |
Цели использования с необходимыми параметрами обработчика приведены в Таблице 23.
Таблица 23. Цели использования обработчика «Вхождение пешехода в область»
| Цель использования | Фиксируемый объект | Важные параметры для этой цели |
|---|---|---|
| Контроль отсутствия людей в запрещенных зонах | Пешеход | - камера |
| - область для пересечения | ||
| - минимальный порог пересечения | ||
| Примечание: Зона распознавания должна быть выбрана таким образом, чтобы пешехода было видно полностью и без перекрытий | ||
| Анализ и учет человеческого потока, проходящего через определенную область | Пешеход | - камера |
| - область для пересечения | ||
| - минимальный порог пересечения | ||
| Примечание: Зона распознавания должна быть выбрана таким образом, чтобы пешехода было видно полностью и без перекрытий |
Примеры использования обработчика с заданными Областями для пересечения приведены в таблице 24.
Таблица 24. Примеры работы обработчика
| Описание | Изображение |
|---|---|
| Контроль людей в запрещенных зонах |  |
| Анализ и учет человеческого потока, проходящего через определенную область |  |
Параметры обработчика приведены в Таблице 25.
Таблица 25. Параметры обработчика «Вхождение пешехода в область»
| Название | Описание | Возможные значения |
|---|---|---|
| Общие | ||
| Тип | Выпадающий список с обработчиками, которые отвечают за детектирование и агрегацию информации для данного сценария | Доступные обработчики (подробнее в начале раздела Обработчики) |
| Камера | Камера, с которой будут получены кадры видеопотока для работы обработчика | Камеры, добавленные в систему |
| Комментарий | Комментарий пользователя | - |
| Статус | Значение активности обработчика | On/Off |
| Настройки камеры и зон распознавания | ||
| Область для пересечения | Выпадающий список для выбора зоны, при попадании пешехода в которую выдается лучший кадр | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Камеры |
| Минимальный порог пересечения | Порог пересечения зоны и детекции пешехода, при превышении которого система считает, что пешеход находится в зоне. При превышении установленного порога система выдает лучший кадр | 0.01…1.00 |
| Количество бестшотов | Максимальное количество лучших кадров (бестшотов) пешехода, которое может быть выдано для трека пешехода. Увеличение количества бестшотов приводит к увеличению утилизации процессора | 1…N |
| - 1 – высокая вероятность получения неверных результатов распознавания | ||
| - N – время выбора лучшего кадра увеличивается, но качество выше | ||
| Максимальное количество бестшотов | Значение данного параметра должно быть больше или равно значению параметра «Количество бестшотов» | 1…10000 |
| - 1 – высокая вероятность получения неверных результатов распознавания из-за низкого качества лучшего кадра | ||
| - 10000 – время выбора лучшего кадра увеличивается, но качество выше |
Вхождение животного в область#
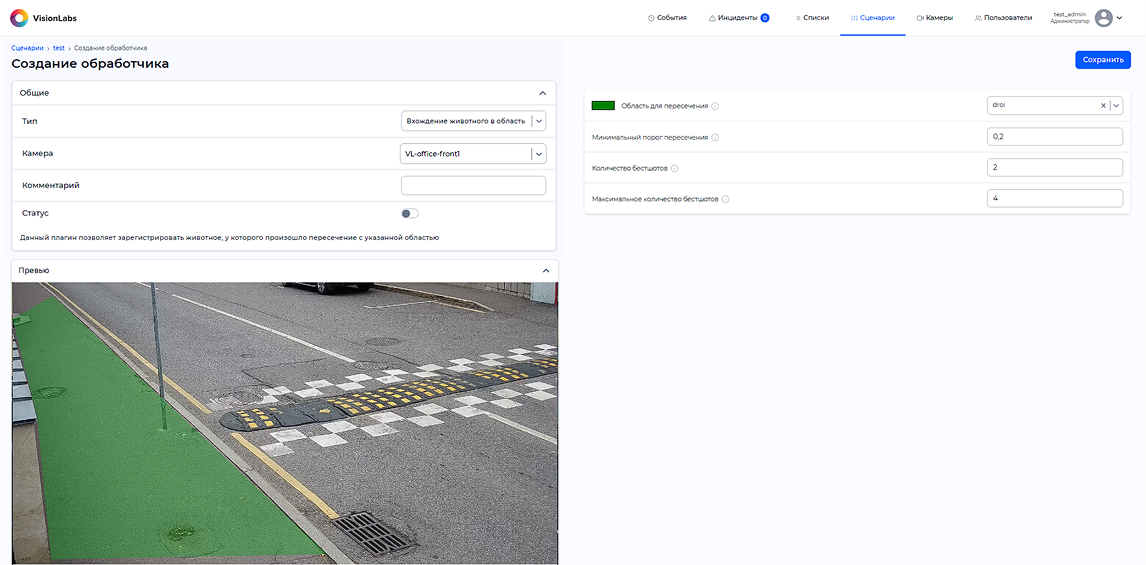
Обработчик «Вхождение животного в область» необходим для создания события или инцидента при пересечении животным Области для пересечения с заданным порогом.
Настройка параметров обработчика «Вхождение животного в область» выполняется в окне настройки обработчика после того, как тип обработчика будет установлен как «Вхождение животного в область» (Рисунок 60).
Пример распознавания животного (Рисунок 61).

| Элемент | Описание | Площадь перекрытия Области для пересечения |
|---|---|---|
| BBox | BBox животного, координаты и размер которого будут сравниваться с Областью для пересечения | - |
|
Область для пересечения | - |
|
Процент площади «Области для пересечения», перекрытой BBox 1 | 0.5 |
Цели использования с необходимыми параметрами обработчика приведены в Таблице 26.
Таблица 26. Цели использования обработчика «Вхождение животного в область»
| Цель использования | Фиксируемый объект | Важные параметры для этой цели |
|---|---|---|
| Контроль животных в запрещенных зонах | Животное | - камера |
| - область для пересечения | ||
| - минимальный порог пересечения | ||
| Примечание: «Область для пересечения» должна быть выбрана таким образом, чтобы животное было видно полностью и без перекрытий |
Примеры использования обработчика с заданными зонами распознавания приведены в таблице 25.
Таблица 27. Примеры работы обработчика
| Описание | Изображение |
|---|---|
| Контроль животных в запрещенных зонах | |
Параметры обработчика приведены в Таблице 26.
Таблица 28. Параметры обработчика «Вхождение животного в область»
| Название | Описание | Возможные значения |
|---|---|---|
| Общие | ||
| Тип | Выпадающий список с обработчиками, которые отвечают за детектирование и агрегацию информации для данного сценария | Доступные обработчики (подробнее в начале раздела Обработчики) |
| Камера | Камера, с которой будут получены кадры видеопотока для работы обработчика | Камеры, добавленные в систему |
| Комментарий | Комментарий пользователя | - |
| Статус | Значение активности обработчика | On/Off |
| Настройки камеры и зон распознавания | ||
| Область для пересечения | Выпадающий список для выбора зоны, при попадании животного в которую выдается лучший кадр | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Камеры |
| Минимальный порог пересечения | Порог пересечения зоны и детекции животного, при превышении которого система считает, что животное находится в зоне. При превышении установленного порога система выдает лучший кадр | 0.01…1.00 |
| Количество бестшотов | Максимальное количество лучших кадров (бестшотов) животного, которое может быть выдано для трека животного. Увеличение количества бестшотов приводит к увеличению утилизации процессора | 1…N |
| - 1 – высокая вероятность получения неверных результатов распознавания | ||
| - N – время выбора лучшего кадра увеличивается, но качество выше | ||
| Максимальное количество бестшотов | Значение данного параметра должно быть больше или равно значению параметра «Количество бестшотов» | 1…10000 |
| - 1 – высокая вероятность получения неверных результатов распознавания из-за низкого качества лучшего кадра | ||
| - 10000 – время выбора лучшего кадра увеличивается, но качество выше |
Подсчет максимального количества животных#
Обработчик «Подсчет максимального количества животных» предназначен для регистрации события или инцидента при изменении количества животных в заданной зоне.
Для данного обработчика в таблицах событий и инцидентов отображается текущее значение количества животных, например, «Количество животных: 4».
Настройка параметров обработчика «Подсчет максимального количества животных» выполняется в окне настройки обработчика после того, как тип обработчика будет установлен как «Подсчет максимального количества животных» (Рисунок 62).
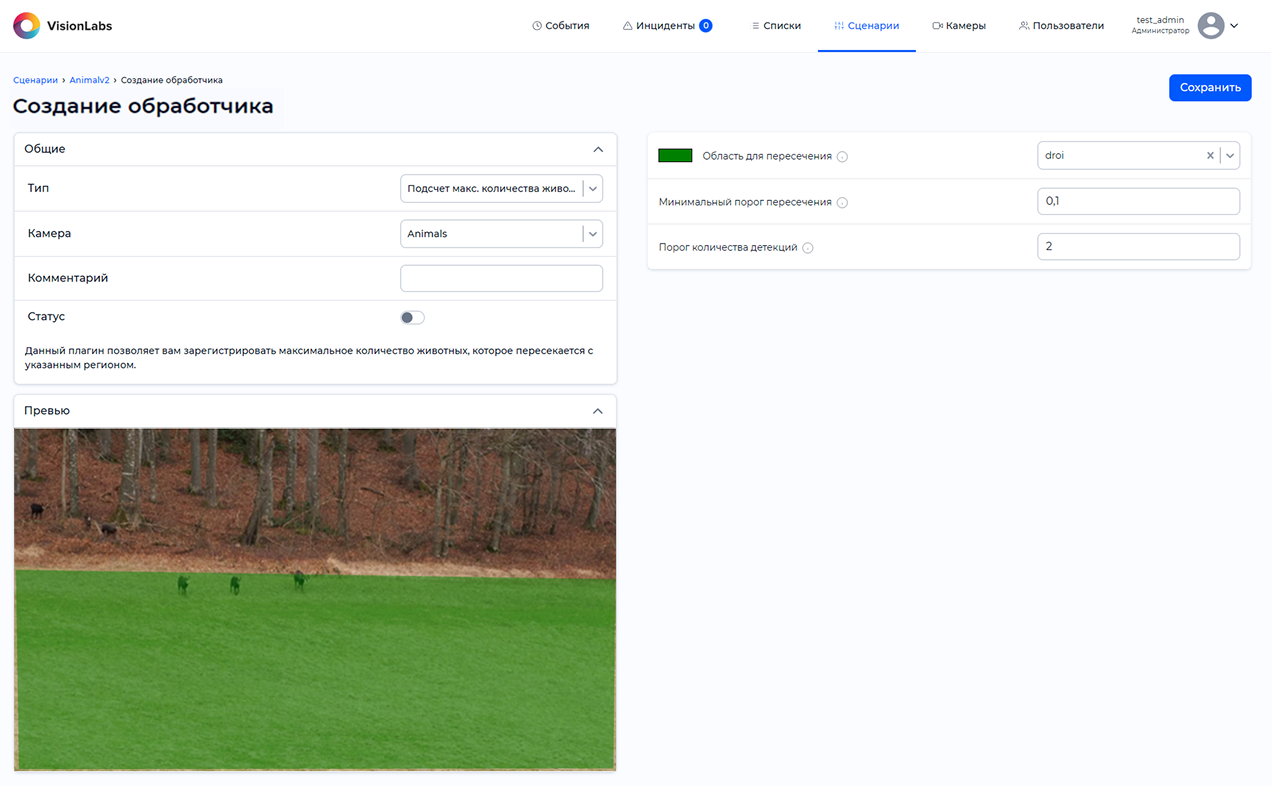
Таблица 29. Параметры обработчика «Подсчет максимального количества животных»
| Название | Описание | Возможные значения |
|---|---|---|
| Общие | ||
| Тип | Выпадающий список с обработчиками, которые отвечают за детектирование и агрегацию информации для данного сценария | Доступные обработчики (подробнее в начале раздела Обработчики) |
| Камера | Камера, с которой будут получены кадры видеопотока для работы обработчика | Камеры, добавленные в систему |
| Комментарий | Комментарий пользователя | - |
| Статус | Значение активности обработчика | On/Off |
| Настройки камеры и зон распознавания | ||
| Область для пересечения | Выпадающий список для выбора зоны, при попадании животного в которую выдается лучший кадр | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Камеры |
| Минимальный порог пересечения | Порог пересечения зоны и детекции животного, при превышении которого система считает, что животное находится в зоне. При превышении установленного порога система выдает лучший кадр | 0.01…1.00 |
| Порог детекций | Пороговое значение количества животных для регистрации бестшота. Значение должно быть больше или равно 1 | 1…100 |
Результаты подсчета максимального количества животных в выбранной области наблюдения отображаются в карточке события или инцидента (Рисунок 63).
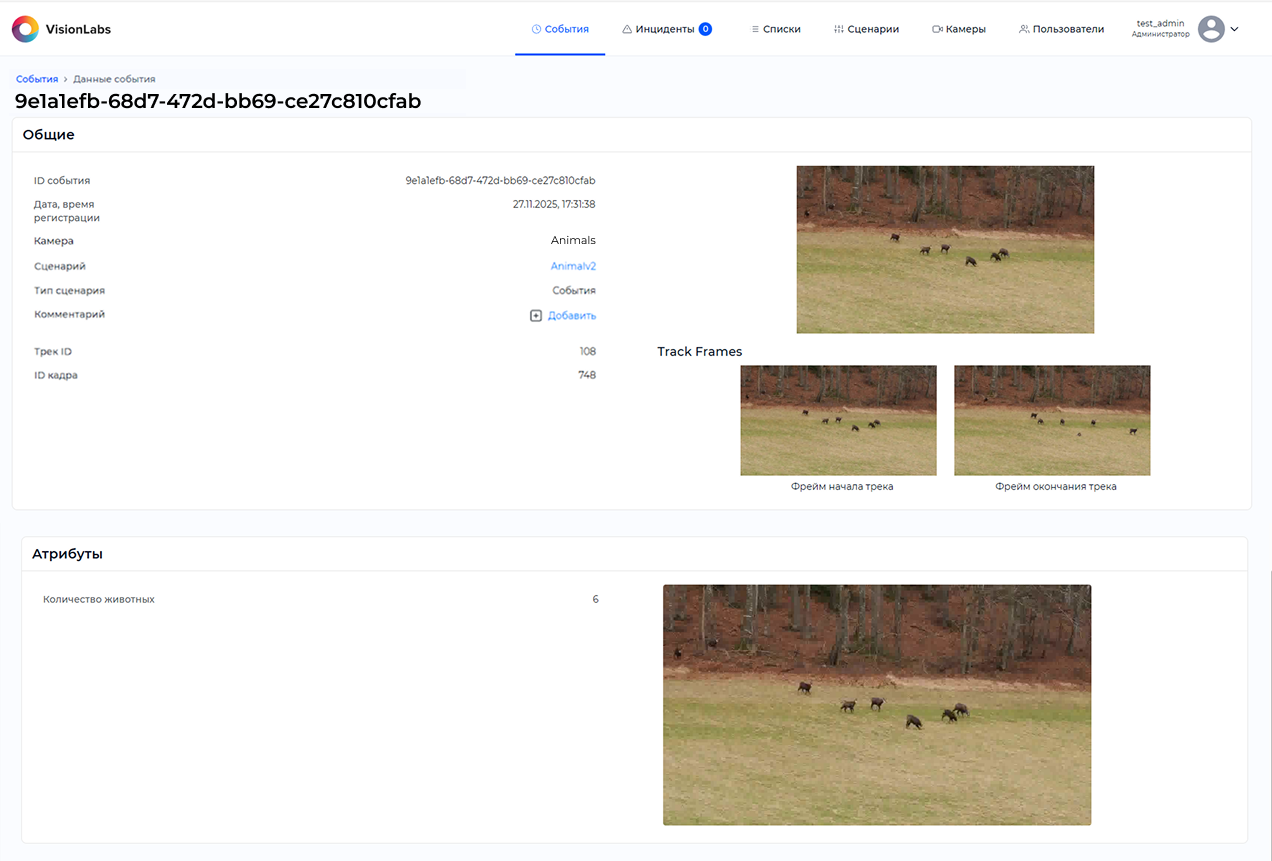
Таблица 30. Описание целей использования обработчика «Подсчет максимального количества животных»
| Цель использования | Фиксируемый объект | Важные параметры для этой цели |
|---|---|---|
| Отслеживание формирования стаи животных в зоне | Животные | - камера; |
| - область для пересечения; | ||
| - порог количества детекций | ||
| Примечание: Событие будет сгенерировано только при изменении количества животных в области наблюдения |
Расчет скорости#
Обработчик «Расчет скорости» имеет похожий принцип работы, как обработчик «Вхождение в область», но позволяет дополнительно фиксировать скорость ТС.
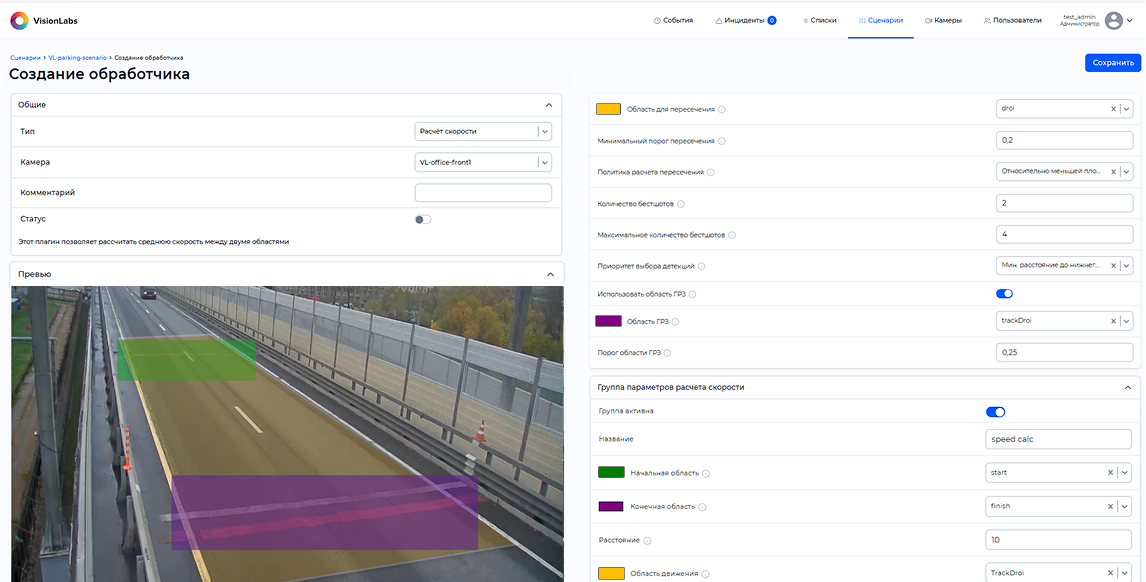
Настройка параметров обработчика «Расчет скорости» выполняется в окне настройки обработчика после того, как тип обработчика будет установлен как «Расчет скорости» (Рисунок 64).
Формирование события или инцидента происходит при пересечении ТС Области для пересечения, а расчет и регистрация скорости происходит после последовательного пересечения Начальной и Конечной областей.
Детекция и трекинг ТС и ГРЗ происходит при вхождении в «Область для пересечения». При определении BBox ТС, вычисляется средняя точка BBox, по которой определяется пересечение с Начальной и Конечной областями.
Рекомендуется формировать зоны Начальной и Конечной областей с достаточной шириной для корректной работы обработчика.
Вычисление скорости происходит после покидания BBox ТС конечной области по окончанию трека.
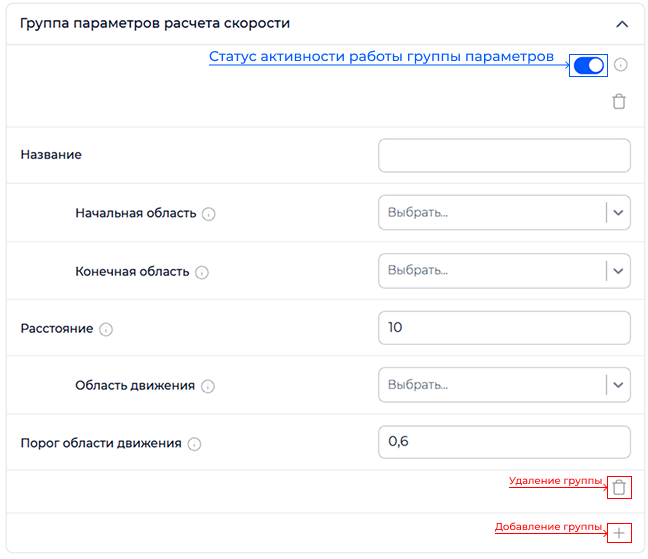
Для работы обработчика создаются группы расчета скорости, в которых задаются индивидуальные параметры (Рисунок 65). В рамках одного обработчика могут быть созданы несколько групп расчета скорости для одного видеопотока (например, группы для попутного и встречного движения и т.п.).
Пример работы обработчика «Расчет скорости» (Рисунок 66).
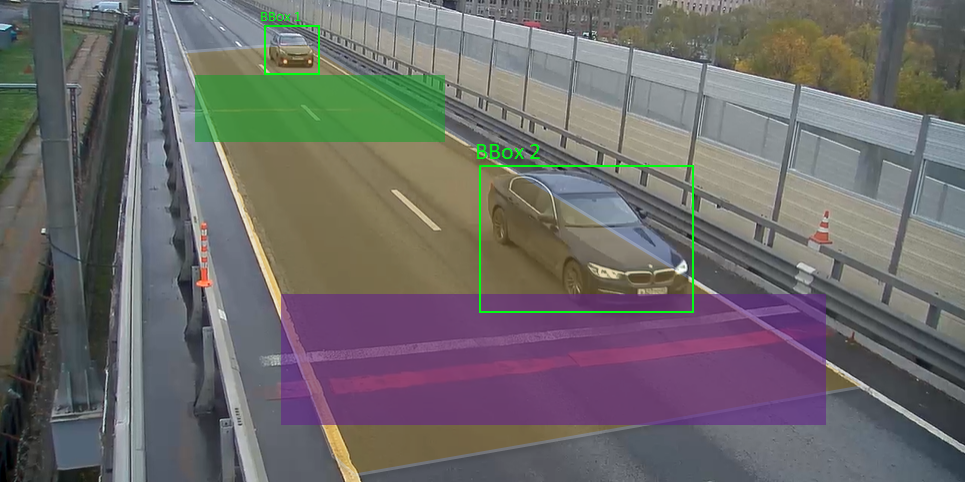
| Элемент | Описание |
|---|---|
| BBox | BBox ТС, координаты и размер которого будут сравниваться с Областью для пересечения |
|
Область для пересечения |
|
Начальная область |
 |
Конечная область |
Цели использования с необходимыми параметрами обработчика приведены в Таблице 31.
Таблица 31. Цели использования обработчика «Расчет скорости»
| Цель использования | Фиксируемый объект | Важные параметры для этой цели |
|---|---|---|
| Мониторинг скоростей ТС на заданной области (сбор, учет и анализ информации о скоростях ТС) | ТС | - камера |
| - область для пересечения | ||
| - минимальный порог пересечения | ||
| - начальная область | ||
| - конечная область | ||
| - расстояние между областями | ||
| Примечание: Область для пересечения должна быть выбрана таким образом, чтобы ТС было видно полностью и без перекрытий, а начальная и конечная области должны быть достаточной ширины для пересечения с геометрическим центром BBox ТС |
Примеры использования обработчика с заданными зонами распознавания приведены в таблице 32.
Таблица 32. Примеры работы обработчика
| Описание | Изображение |
|---|---|
| Мониторинг скоростей ТС на заданной области (сбор, учет и анализ информации о скоростях ТС) | 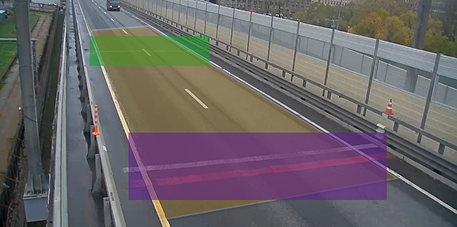 |
Параметры обработчика приведены в Таблице 33.
Таблица 33. Параметры обработчика Расчет скорости
| Название | Описание | Возможные значения |
|---|---|---|
| Общие | ||
| Тип | Выпадающий список с обработчиками, которые отвечают за детектирование и агрегацию информации для данного сценария | Доступные обработчики (подробнее в начале раздела Обработчики) |
| Камера | Камера, с которой будут получены кадры видеопотока для работы обработчика | Камеры, добавленные в систему |
| Комментарий | Комментарий пользователя | - |
| Статус | Значение активности обработчика | On/Off |
| Настройки камеры и зон распознавания | ||
| Область для пересечения | Выпадающий список для выбора зоны, при попадании ТС в которую выдается лучший кадр | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Камеры |
| Минимальный порог пересечения | Порог пересечения зоны и детекции ТС, при превышении которого система считает, что ТС находится в зоне. При превышении установленного порога система выдает лучший кадр | 0.01…1.00 |
| Политика расчёта пересечения | Выпадающий список, задающий, относительно какой площади считать процент пересечения ТС с выбранной зоной: зона (площадь пересечения/площадь зоны), детекция ТС (площадь пересечения/площадь детекции) или меньшая из площадей (площадь пересечения/min(площади зоны, площади детекции)) | - Относительно площади зоны; |
| - Относительно площади детекции; | ||
| - Относительно меньшей площади | ||
| Количество бестшотов | Максимальное количество лучших кадров (бестшотов) ТС с ГРЗ, которое может быть выдано для трека ТС. Чем больше будет собрано лучших кадров, тем точнее будет выданная информация по атрибутам ТС. Увеличение количества бестшотов приводит к увеличению утилизации процессора | 1…N |
| - 1 – высокая вероятность получения неверных результатов распознавания | ||
| - N – время выбора лучшего кадра увеличивается, но качество выше | ||
| Максимальное количество бестшотов | Количество бестшотов – это максимальное количество ТС с ГРЗ. Максимальное количество бестшотов – это максимальное количество ТС с ГРЗ и без ГРЗ для одного трека. Максимальное количество бестшотов - (минус) Количество бестшотов = Максимальное количество бестшотов ТС без ГРЗ. Значение данного параметра должно быть больше или равно значению параметра «Количество бестшотов» | 1…10000 |
| - 1 – высокая вероятность получения неверных результатов распознавания из-за низкого качества лучшего кадра | ||
| - 10000 – время выбора лучшего кадра увеличивается, но качество выше | ||
| Приоритет выбора детекций | Выбор алгоритма для отбора наилучших кадров | - Мин. расстояние до нижнего края – лучшей детекцией считается детекция, находящаяся ближе всего к нижней границе кадра; |
| - Мин. область детекции – лучшей детекцией считается детекция с минимальной площадью; | ||
| - Макс. область детекции – лучшей детекцией считается детекция с максимальной площадью; | ||
| - Мин. ID кадра – лучшей детекцией считается детекция с минимальным ID кадра, т.е. детекция при «входе» объекта в кадр; | ||
| - Макс. ID кадра – лучшей детекцией считается детекция с максимальным ID кадра, т.е. детекция при «выходе» объекта из кадра; | ||
| - Мин. пересечение – лучшей детекцией считается детекция с минимальной долей пересечения с областью для пересечения; | ||
| - Макс. пересечение – лучшей детекцией считается детекция с максимальной долей пересечения с областью для пересечения | ||
| Использовать область ГРЗ | Использование дополнительной зоны распознавания для работы с частью дороги, в которой ГРЗ будет виден лучше всего. Рекомендуется использовать: | On/Off |
| - Если есть участок пути, где ТС замедляется и номер меньше всего смазывается; | ||
| - Если камера установлена так, что на части трека внутри зоны распознавания ГРЗ не видно и необходимо явно указать место фиксации ГРЗ | ||
| Область ГРЗ | Выпадающий список для выбора зоны распознавания ГРЗ. Система распознает ГРЗ только в случае попадания BBox ГРЗ в данную зону | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Камеры |
| Порог области ГРЗ | Порог пересечения зоны и BBox ГРЗ, при превышении которого система считает, что ГРЗ находится в данной зоне | 0.01…1.00 |
| Группа параметров расчета скорости | ||
| Название | Название группы параметров расчета скорости | - |
| Начальная область | Выпадающий список для выбора зоны, в которой проверяются пересечения BBox ТС для фиксации начальной контрольной точки | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Камеры |
| Конечная область | Выпадающий список для выбора зоны, в которой проверяются пересечения BBox ТС для фиксации завершающей контрольной точки | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Камеры |
| Расстояние | Расстояние между Начальной и Конечной областями в метрах | 0.01…1000 |
| Область движения | Выпадающий список для выбора зоны детекции, в которой проверяются пересечения ТС. Введение дополнительной зоны позволит отсекать события, которые не требуется фиксировать | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Камеры |
| Порог области движения | Порог по пересечению области с детекцией, чтобы считать что данное пересечение - «Область движения», т.е. при превышении установленного порога будет сформировано событие/инцидент. Чем выше порог, тем точнее будет детекция ТС и ГРЗ, но количество пропусков также увеличится | 0.01…1.00 |
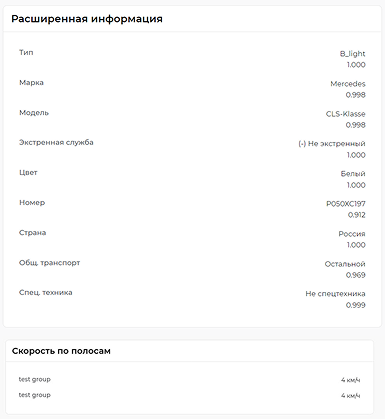
Результаты вычисления скорости отображаются в карточке события или инцидента (Рисунок 67).
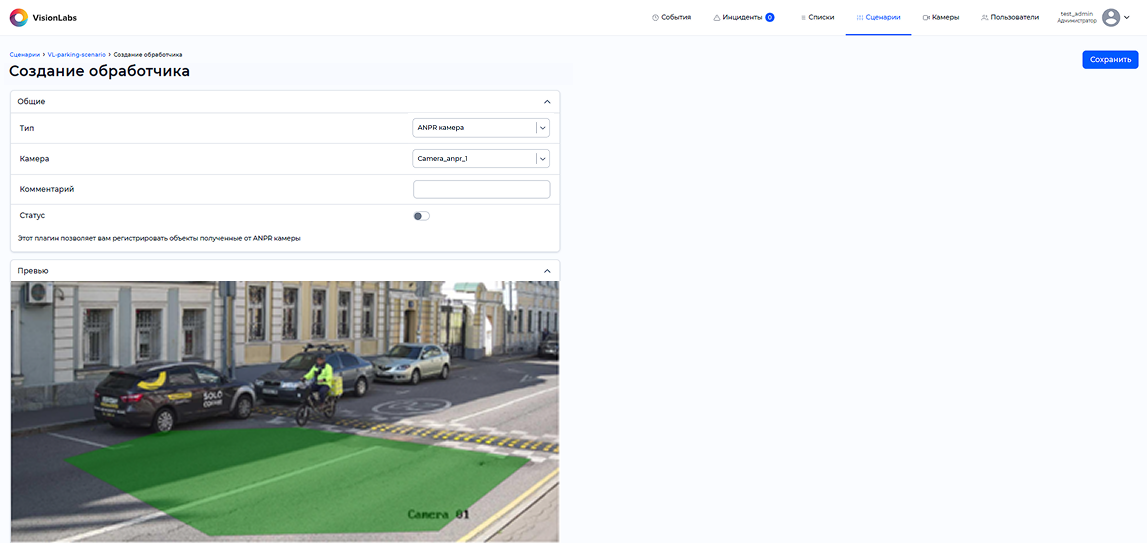
ANPR камера#
Обработчик «ANPR камера» позволяет регистрировать объекты полученные от ANPR камеры.
Настройка параметров обработчика «ANPR камера» выполняется в окне настройки обработчика после того, как тип обработчика будет установлен как «ANPR камера» (Рисунок 68).
Настройки зон детекции и зон распознавания для обработчика «ANPR камера» доступны в разделе Камеры в блоке «Настройки» для типа источника ANPR камера.
Параметры обработчика приведены в Таблице 34.
Таблица 34. Параметры обработчика «ANPR камера»
| Название | Описание | Возможные значения |
|---|---|---|
| Общие | ||
| Тип | Выпадающий список с обработчиками, которые отвечают за детектирование и агрегацию информации для данного сценария | Доступные обработчики (подробнее в начале раздела Обработчики) |
| Камера | Камера, с которой будут получены кадры видеопотока для работы обработчика | Камеры, добавленные в систему |
| Комментарий | Комментарий пользователя | - |
| Статус | Значение активности обработчика | On/Off |
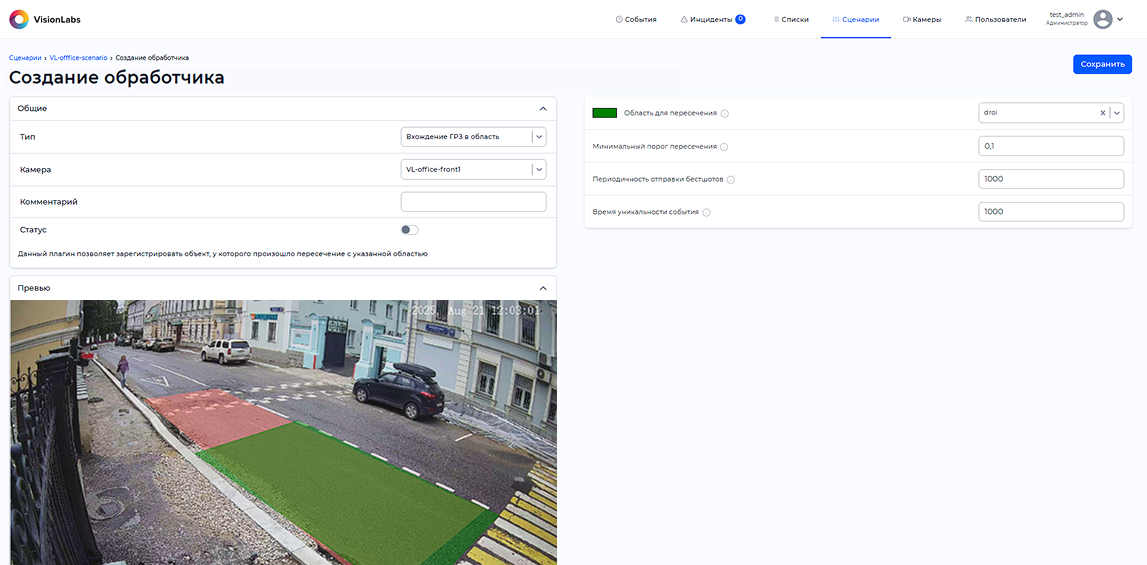
Вхождение ГРЗ в область#
Обработчик «Вхождение ГРЗ в область» необходим для создания события или инцидента при пересечении ГРЗ области для пересечения с заданным порогом.
Настройка параметров обработчика «Вхождение ГРЗ в область» выполняется в окне настройки обработчика после того, как тип обработчика будет установлен как «Вхождение ГРЗ в область» (Рисунок 69).
Параметры обработчика приведены в Таблице 35.
Таблица 35. Параметры обработчика «Вхождение ГРЗ в область»
| Название | Описание | Возможные значения |
|---|---|---|
| Общие | ||
| Тип | Выпадающий список с обработчиками, которые отвечают за детектирование и агрегацию информации для данного сценария | Доступные обработчики (подробнее в начале раздела Обработчики) |
| Камера | Камера, с которой будут получены кадры видеопотока для работы обработчика | Камеры, добавленные в систему |
| Комментарий | Комментарий пользователя | - |
| Статус | Значение активности обработчика | On/Off |
| Настройки камеры и зон распознавания | ||
| Область для пересечения | Выпадающий список для выбора зоны, при попадании ТС в которую выдается лучший кадр | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Камеры |
| Минимальный порог пересечения | Порог пересечения зоны и детекции ТС, при превышении которого система считает, что ТС находится в зоне. При превышении установленного порога система выдает лучший кадр | 0.01…1.00 |
| Периодичность отправки бестшотов | Периодичность отправки лучших кадров по треку. Необходимо увеличивать паузу, чтобы ТС на кадрах было детектировано с разных ракурсов. Набор из лучших кадров трека позволяет повысить вероятность правильного распознавания атрибутов ТС | 0…60000 |
| - 0 – нет задержки | ||
| - 1…60000 – пауза в миллисекундах | ||
| Время уникальности события | Максимальная длительность, при которой два одинаковых полученных номера будут считаться за одно и то же событие | 1…60000 |
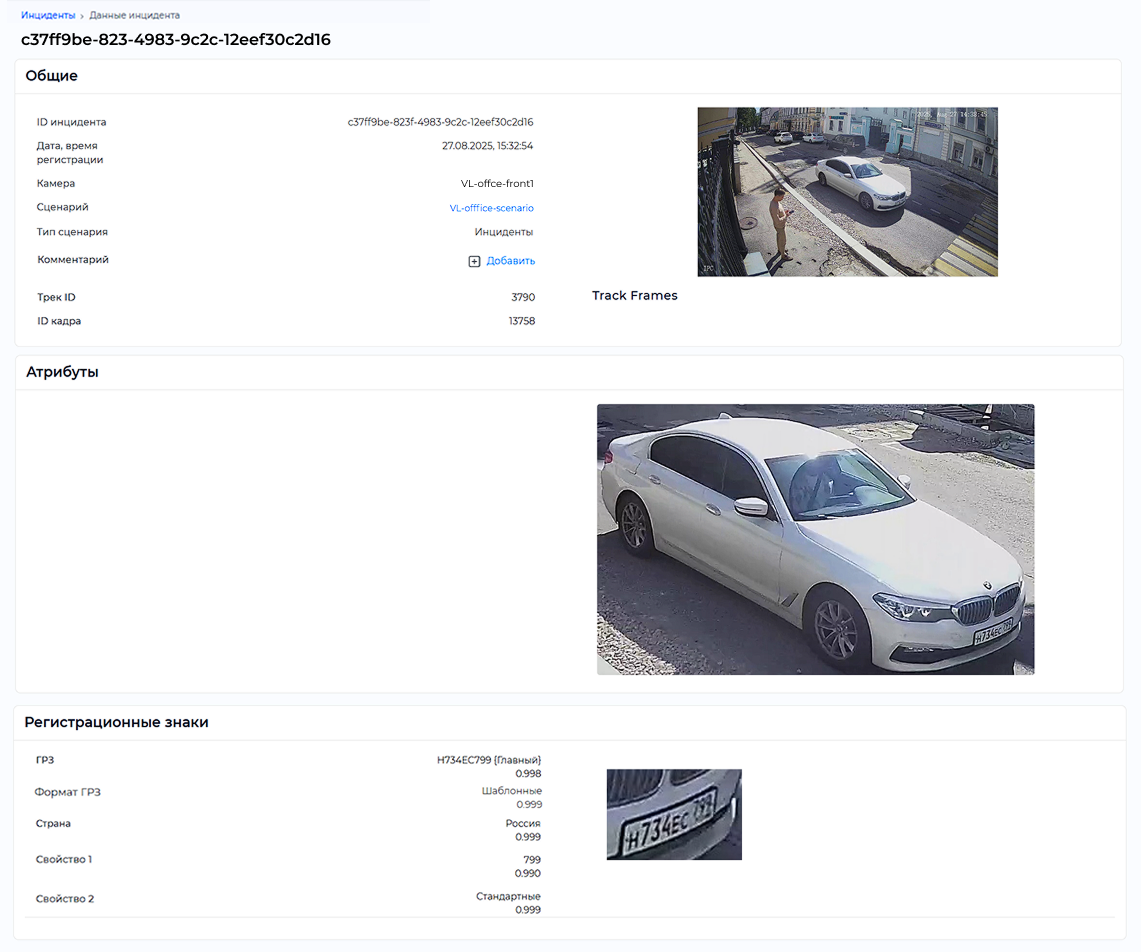
Пример детекции ГРЗ при работе обработчика «Вхождение ГРЗ в область» (Рисунок 70).
Цели использования с необходимыми параметрами обработчика приведены в Таблице 36.
Таблица 36. Описание целей использования обработчика «Вхождение ГРЗ в область»
| Цель использования | Фиксируемый объект | Важные параметры для этой цели |
|---|---|---|
| Фиксация ГРЗ на участке с остановкой или барьерным КПП (со шлагбаумом) для приоритизации событий на ГРЗ | ГРЗ | - камера; |
| - область для пересечения | ||
| - минимальный порог пересечения | ||
| Примечание: Область для пересечения должна быть выбрана таким образом, чтобы ГРЗ было видно целиком, отчетливо и без перекрытий |
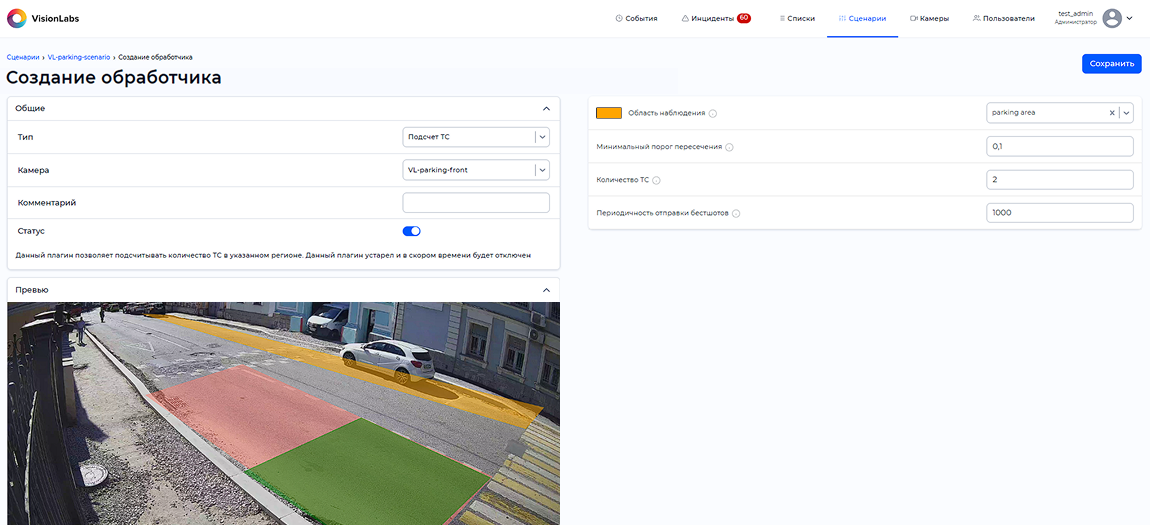
Подсчет ТС#
Обработчик «Подсчет ТС» необходим для создания события или инцидента при подсчете количества ТС в указанном регионе с заданным порогом.
Настройка параметров обработчика «Подсчет ТС» выполняется в окне настройки обработчика после того, как тип обработчика будет установлен как «Подсчет ТС» (Рисунок 71).
Параметры обработчика приведены в Таблице 37.
Таблица 37. Параметры обработчика «Подсчет ТС»
| Название | Описание | Возможные значения |
|---|---|---|
| Общие | ||
| Тип | Выпадающий список с обработчиками, которые отвечают за детектирование и агрегацию информации для данного сценария | Доступные обработчики (подробнее в начале раздела Обработчики) |
| Камера | Камера, с которой будут получены кадры видеопотока для работы обработчика | Камеры, добавленные в систему |
| Комментарий | Комментарий пользователя | - |
| Статус | Значение активности обработчика | On/Off |
| Настройки камеры и зон распознавания | ||
| Область наблюдения | Выпадающий список для выбора зоны, в которой идет подсчет ТС для работы сценария | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Камеры |
| Минимальный порог пересечения | Порог по пересечению области с детекцией, чтобы считать что данное пересечение - «Вхождение в область», т.е. при превышении установленного порога будет сформировано событие/инцидент | 0.01…1.00 |
| Количество ТС | Минимальное количество автомобилей, для которых генерируется событие | 0…10000 |
| Периодичность отправки бестшотов | Периодичность отправки лучших кадров по треку. Необходимо увеличивать паузу, чтобы ТС на кадрах было детектировано с разных ракурсов. Набор из лучших кадров трека позволяет повысить вероятность правильного распознавания атрибутов ТС | 0…60000 |
| - 0 – нет задержки | ||
| - 1…60000 – пауза в миллисекундах |
Результаты подсчета количества ТС в выбранной области наблюдения отображаются в карточке события или инцидента (Рисунок 72).
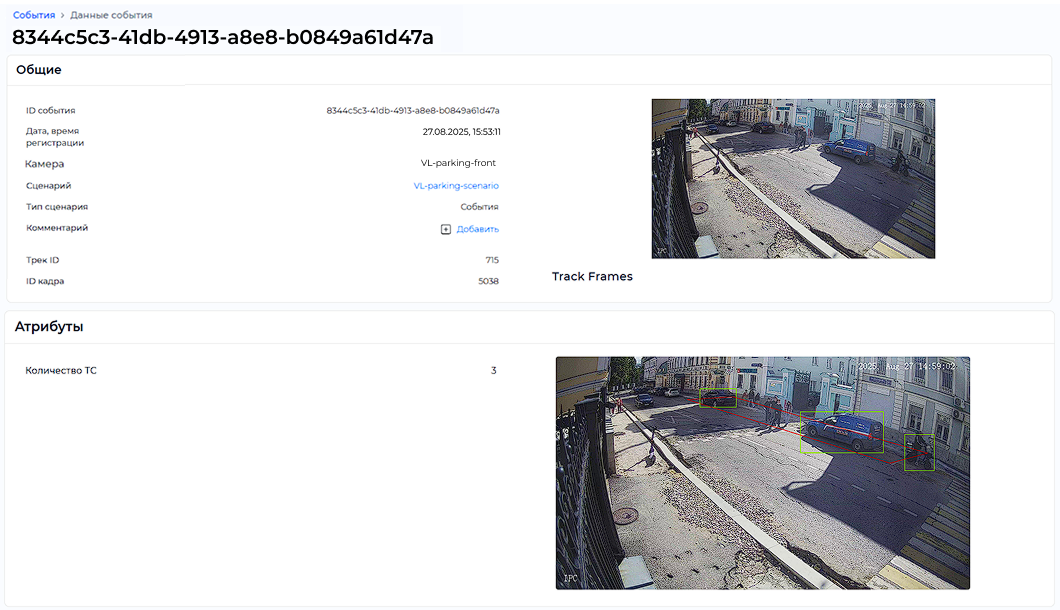
В случае регистрации события с превышением параметра «Количество ТС» в зоне контроля, следующее событие регистрируется только в случае увеличения количества ТС в зоне контроля. Пример работы обработчика «Подсчет ТС» приведен в Таблице 38.
Таблица 38. Пример работы обработчика «Подсчет ТС»
| Этап обработки кадров | Описание события | Статус события |
|---|---|---|
| (1) | В зоне контроля больше Х машин | Регистрируется |
| (2) | Через заданный интервал, при подсчете ТС в зоне контроля, Х машин | Не регистрируется |
| (3) | Через заданный интервал, при подсчете ТС в зоне контроля, Х – 1 машин | Не регистрируется |
| (4) | Через заданный интервал, при подсчете ТС в зоне контроля, X машин | Регистрируется |
| (5) | Через заданный интервал, при подсчете ТС в зоне контроля, Х + 1 машин | Регистрируется |
Цели использования с необходимыми параметрами обработчика приведены в Таблице 39.
Таблица 39. Описание целей использования обработчика «Подсчет ТС»
| Цель использования | Фиксируемый объект | Важные параметры для этой цели |
|---|---|---|
| Детекция количества ТС в контрольной зоне, без учета прочих атрибутов | ТС | - камера; |
| - область наблюдения | ||
| - минимальный порог пересечения | ||
| - количество ТС | ||
| Примечание: Событие будет сгенерировано только при достижении указанного значения количества ТС в области наблюдения |
Счетчик ТС#
Обработчик «Счетчик ТС» предназначен для подсчета количества ТС в указанной зоне. Обработчик считает количество ТС в зоне и формирует событие при любом изменении. Подходит для оценки занятости одного или нескольких парковочных мест. Для данного обработчика в таблицах событий и инцидентов отображается текущее значение количества ТС и разница, например, «Количество ТС: 2 −1».
Настройка параметров обработчика «Счетчик ТС» выполняется в окне настройки обработчика после того, как тип обработчика будет установлен как «Счетчик ТС» (Рисунок 73).
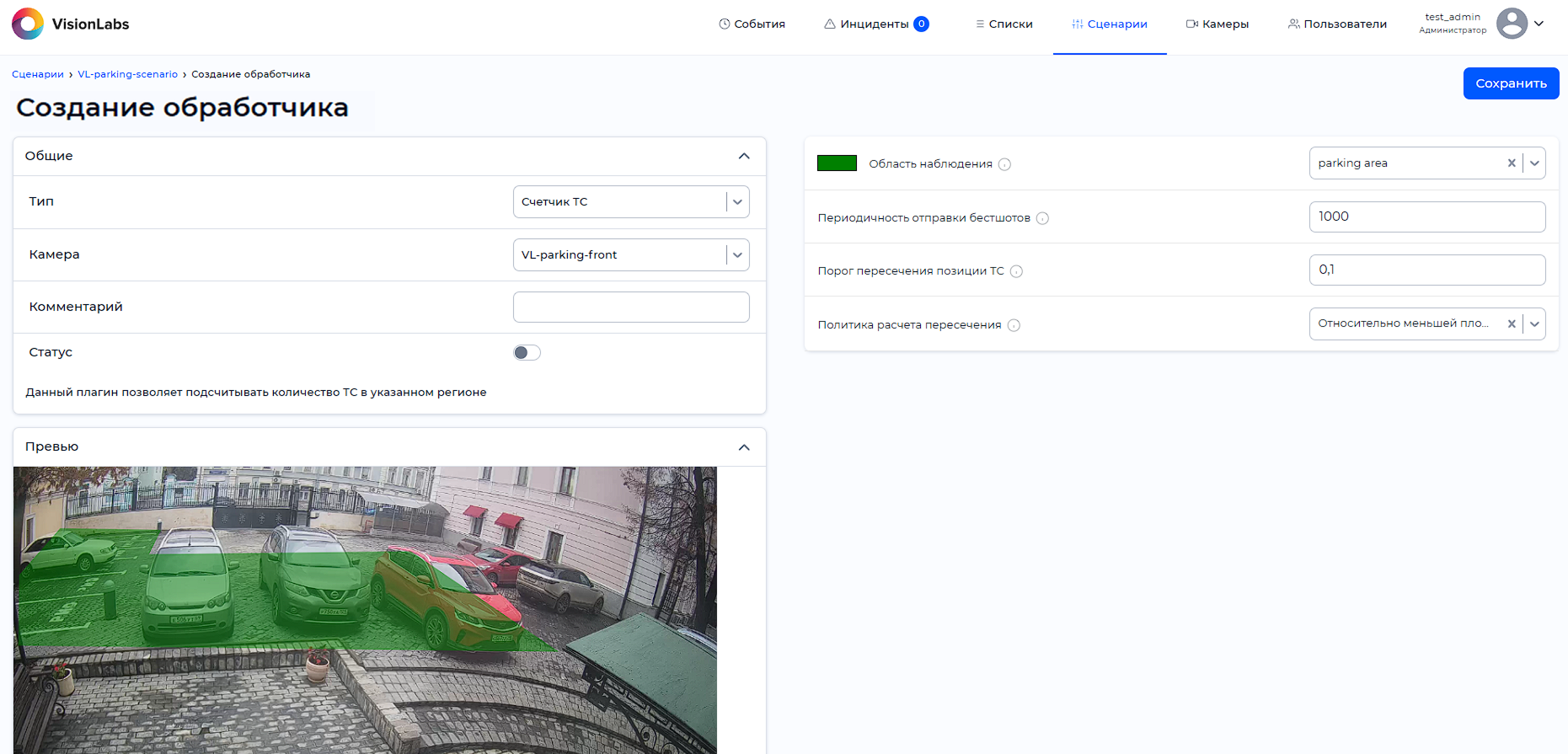
Таблица 40. Параметры обработчика «Счетчик ТС»
| Название | Описание | Возможные значения |
|---|---|---|
| Общие | ||
| Тип | Выпадающий список с обработчиками, которые отвечают за детектирование и агрегацию информации для данного сценария | Доступные обработчики (подробнее в начале раздела Обработчики) |
| Камера | Камера, с которой будут получены кадры видеопотока для работы обработчика | Камеры, добавленные в систему |
| Комментарий | Комментарий пользователя | - |
| Статус | Значение активности обработчика | On/Off |
| Настройки камеры и зон распознавания | ||
| Область наблюдения | Выпадающий список для выбора зоны, в которой идет подсчет ТС | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Камеры |
| Периодичность отправки бестшотов | Периодичность отправки лучших кадров по треку. Необходимо увеличивать паузу, чтобы ТС на кадрах было детектировано с разных ракурсов. Набор из лучших кадров трека позволяет повысить вероятность правильного распознавания атрибутов ТС | 0…60000 |
| - 0 – нет задержки | ||
| - 1…60000 – пауза в миллисекундах | ||
| Порог пересечения позиции ТС | Порог по пересечению позиции ТС с заданной зоной. Для определения попадания ТС в зону рассчитывается процент попадания позиции ТС в зону. Если рассчитанный процент больше порога, то считается, что ТС находится в зоне, после чего оно регистрируется | 0.01…1.00 |
| Политика расчёта пересечения | Выпадающий список, задающий, относительно какой площади считать процент пересечения ТС с выбранной зоной: зона (площадь пересечения/площадь зоны), детекция ТС (площадь пересечения/площадь позиционирования) или меньшая из площадей (площадь пересечения/min(площади зоны, площади позиционирования)) | - Относительно площади зоны; |
| - Относительно площади детекции; | ||
| - Относительно меньшей площади |
Результаты счетчика ТС в выбранной области наблюдения отображаются в карточке события или инцидента (Рисунок 74).
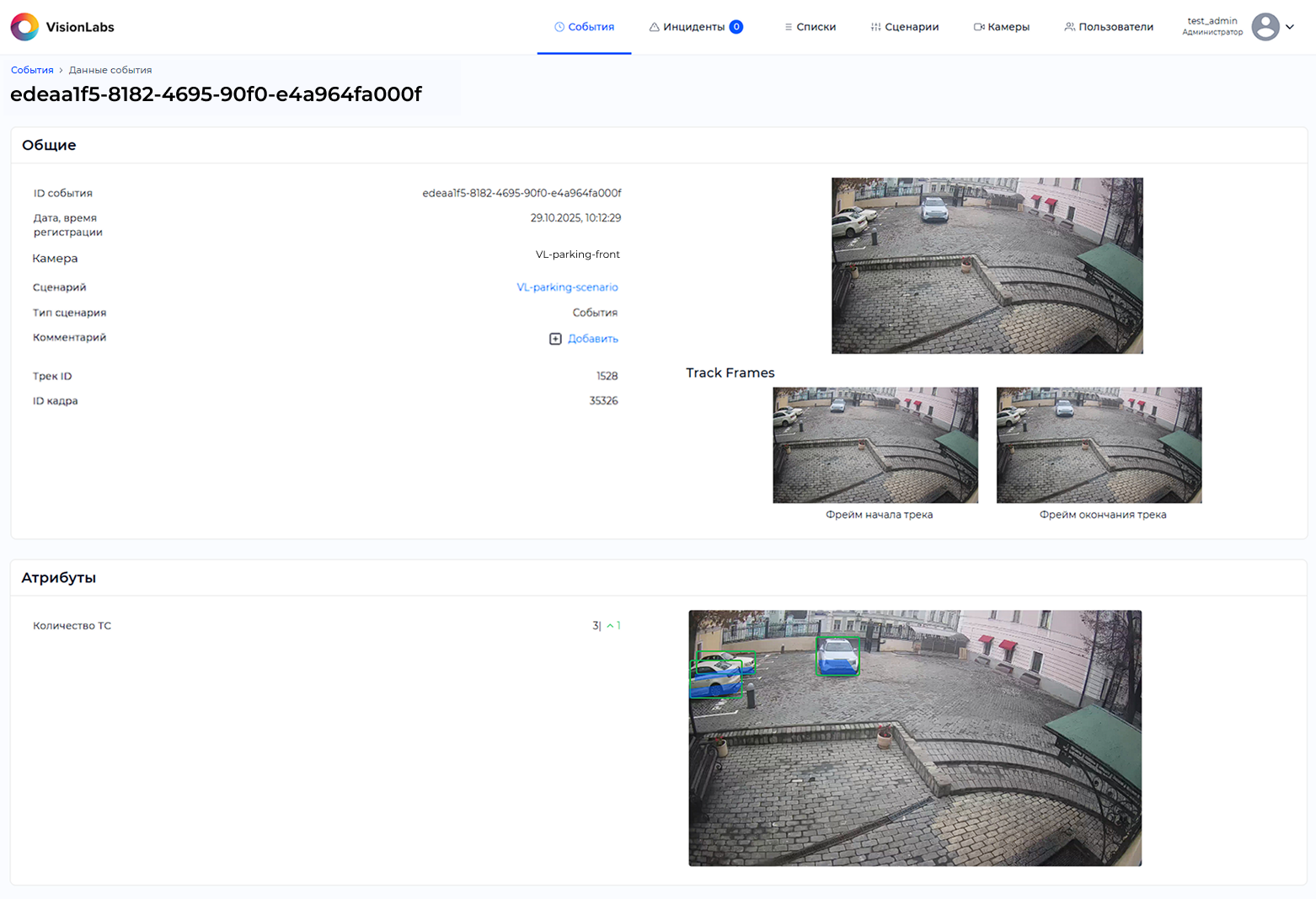
При нажатии на любой кадр открывается расширенная информация кадра (Рисунок 75).
Появляется всплывающее окно, содержащее:
- Frame ID – идентификатор кадра
- Время – дата и время детектирования события
- Тип – тип кадра
- Лейбл – название типа кадра
- Зоны распознавания - с помощью чекбоксов можно показать зоны распознавания в кадре
- Распознанные ТС - при активации чекбоксов можно выделить детектированные объекты на кадре, используя BBox и позицию ТС (проекция автомобиля на дорогу)

Таблица 41. Описание целей использования обработчика «Счетчик ТС»
| Цель использования | Фиксируемый объект | Важные параметры для этой цели |
|---|---|---|
| Счетчик ТС в зоне парковки, без учета прочих атрибутов | ТС | - камера; |
| - область наблюдения | ||
| - периодичность отправки бестшотов | ||
| - порог пересечения позиции ТС | ||
| - политика расчета пересечения | ||
| Примечание: Событие будет сгенерировано только при изменении количества ТС в области наблюдения |
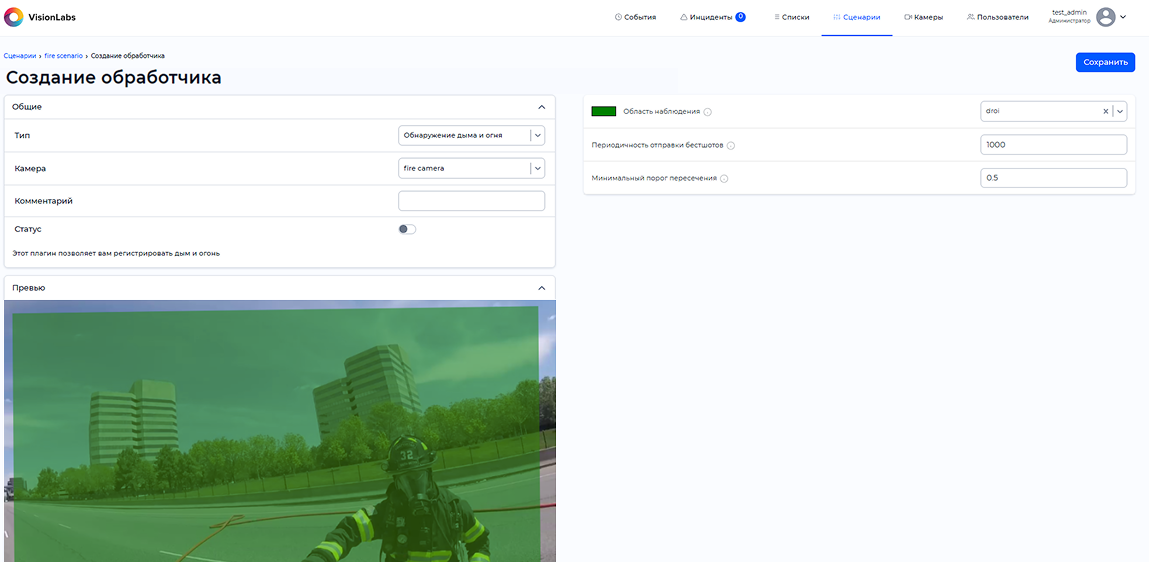
Обнаружение дыма и огня#
Обработчик «Обнаружение дыма и огня» необходим для создания события или инцидента при обнаружении дыма и огня в указанном регионе с заданным порогом.
Настройка параметров обработчика «Обнаружение дыма и огня» выполняется в окне настройки обработчика после того, как тип обработчика будет установлен как «Обнаружение дыма и огня» (Рисунок 76).
Параметры обработчика приведены в Таблице 42.
Таблица 42. Параметры обработчика «Обнаружение дыма и огня»
| Название | Описание | Возможные значения |
|---|---|---|
| Общие | ||
| Тип | Выпадающий список с обработчиками, которые отвечают за детектирование и агрегацию информации для данного сценария | Доступные обработчики (подробнее в начале раздела Обработчики) |
| Камера | Камера, с которой будут получены кадры видеопотока для работы обработчика | Камеры, добавленные в систему |
| Комментарий | Комментарий пользователя | - |
| Статус | Значение активности обработчика | On/Off |
| Настройки камеры и зон распознавания | ||
| Область наблюдения | Выпадающий список для выбора зоны, в которой идет обнаружение дыма и огня для работы сценария | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Камеры |
| Периодичность отправки бестшотов | Периодичность отправки лучших кадров по треку. Необходимо увеличивать паузу, чтобы дым и огонь на кадрах было детектировано с разных ракурсов. Набор из лучших кадров трека позволяет повысить вероятность правильного распознавания дыма и огня | 0…60000 |
| - 0 – нет задержки | ||
| - 1…60000 – пауза в миллисекундах | ||
| Минимальный порог пересечения | Порог по пересечению области с детекцией, чтобы считать что данное пересечение - «Вхождение в область», т.е. при превышении установленного порога будет сформировано событие/инцидент | 0.01…1.00 |
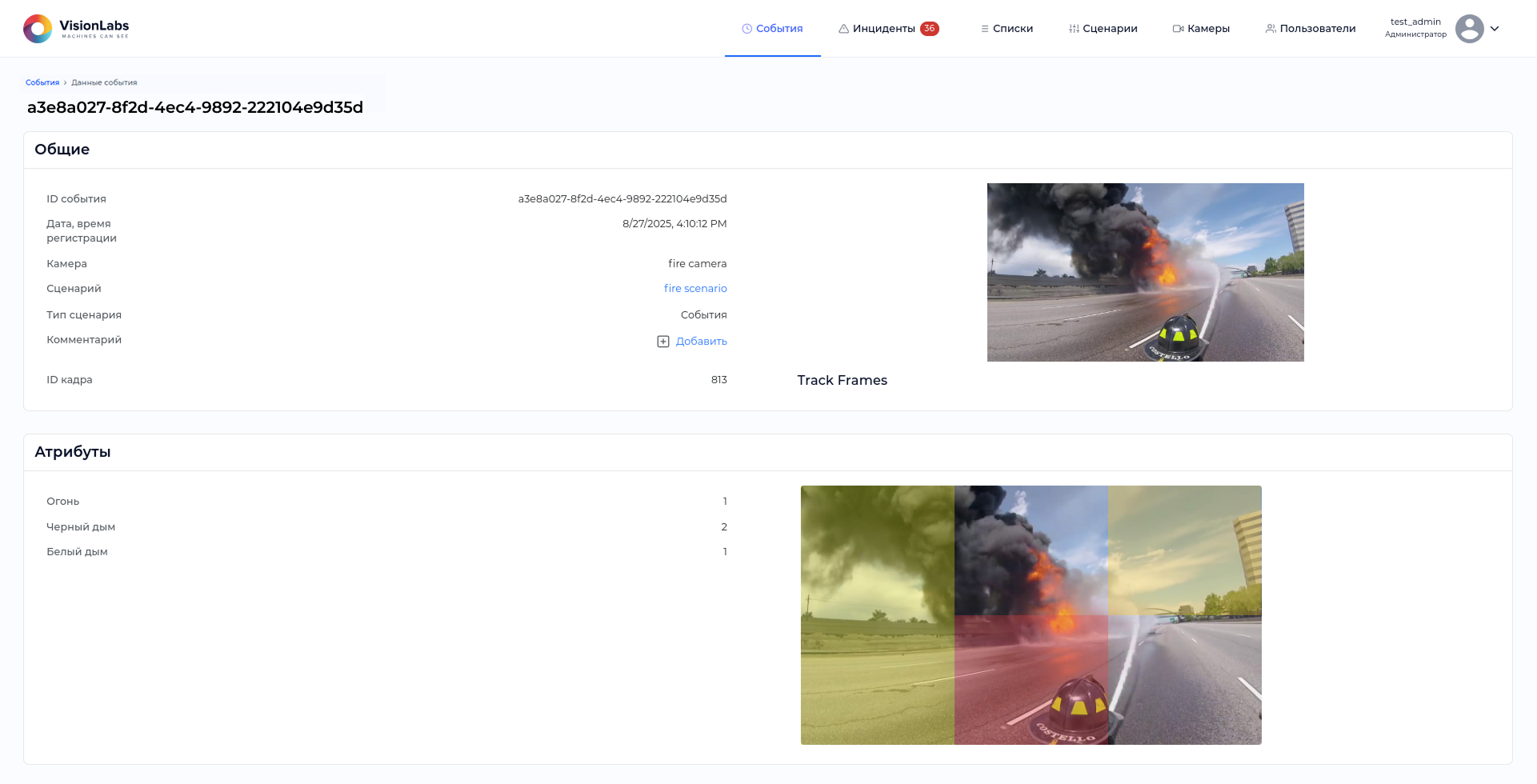
Результаты обнаружения дыма и огня в выбранной области наблюдения отображаются в карточке события или инцидента (Рисунок 77).
Цели использования с необходимыми параметрами обработчика приведены в Таблице 43.
Таблица 43. Описание целей использования обработчика «Обнаружение дыма и огня»
| Цель использования | Фиксируемый объект | Важные параметры для этой цели |
|---|---|---|
| Фиксация тревожных событий в случае обнаружения дыма и огня | - Огонь | - камера; |
| - Черный дым | - область наблюдения | |
| - Белый дым | - минимальный порог пересечения | |
| Примечание: Входное изображение делится на 6 зон, в каждой из которых детектируется один из атрибутов инцидента |
Отслеживание дыма и огня#
Обработчик «Отслеживание дыма и огня» используется для создания события или инцидента при обнаружении дыма и огня в заданной области с учетом настроенных пороговых значений. Система отслеживает появление и завершение события, фиксируя моменты, когда количество ячеек с дымом или огнем превышает установленные пороги. Для каждого класса (черный дым, белый дым, огонь) можно задать минимальное количество ячеек, в которых будет зафиксирован данный класс. Когда количество ячеек с огнем и дымом опускается ниже порога, событие фиксируется как завершенное. Также предусмотрена возможность исключения областей для отслеживания, где события не будут учитываться.
Результаты отслеживания дыма и огня отображаются в карточке события или инцидента. Открыв событие, можно увидеть его детали: когда было начало возгорания (например, когда была зафиксирована первая ячейка с огнем), моменты максимальной активности (бестшот, когда значения порогов были максимальны в рамках всего события, например 2 огня и 3 дыма), а также окончание события (когда количество ячеек с дымом и огнем снова опустилось ниже порогов и детекция завершилась).
Перед настройкой параметров обработчика необходимо выполнить несколько предварительных настроек камеры на странице настройки камеры:
1․ Укажите количество колонок и рядов в разметочной сетке (Рисунок 78).
2․ При добавлении зоны распознавания включите с помощью переключателя сектора сетки. Используйте сектора сетки, чтобы обозначить области, в которых будет происходить трекинг дыма и огня, или, наоборот, зоны для исключения, которые система будет игнорировать. Чтобы выбрать ячейку сетки, кликните на неё. Повторный клик отменит выбор. (Рисунок 79).
Важно: Если на камере не указаны параметры сетки (количество блоков по вертикали и горизонтали), при попытке создать сценарий с обработчиком «Отслеживание дыма и огня» будет выведена ошибка.
Настройка параметров обработчика «Отслеживание дыма и огня» выполняется в окне настройки обработчика после того, как тип обработчика будет установлен как «Отслеживание дыма и огня» (Рисунок 80).
Параметры обработчика приведены в Таблице 44.
Таблица 44. Параметры обработчика «Отслеживание дыма и огня»
| Название | Описание | Возможные значения |
|---|---|---|
| Общие | ||
| Тип | Выпадающий список с обработчиками, которые отвечают за детектирование и агрегацию информации для данного сценария | Доступные обработчики (подробнее в начале раздела Обработчики) |
| Камера | Камера, с которой будут получены кадры видеопотока для работы обработчика | Камеры, добавленные в систему |
| Комментарий | Комментарий пользователя | - |
| Статус | Значение активности обработчика | On/Off |
| Настройки камеры и зон распознавания | ||
| Область наблюдения | Выпадающий список для выбора зоны, в которой идет отслеживание дыма и огня для работы сценария | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Камеры |
| Минимальный порог пересечения | Порог по пересечению области с детекцией, чтобы считать что данное пересечение - «Вхождение в область», т.е. при превышении установленного порога будет сформировано событие/инцидент | 0.01…1.00 |
| Периодичность отправки бестшотов | Периодичность отправки лучших кадров по треку. Необходимо увеличивать паузу, чтобы дым и огонь на кадрах было детектировано с разных ракурсов. Набор из лучших кадров трека позволяет повысить вероятность правильного распознавания дыма и огня | 0…60000 |
| - 0 – нет задержки | ||
| - 1…60000 – пауза в миллисекундах | ||
| Количество ячеек с огнем | Минимальное количество ячеек с огнем для создания события или инцидента | Количество ячеек, выбранных в настройках камеры |
| Количество ячеек с черным дымом | Минимальное количество ячеек с черным дымом для создания события или инцидента | Количество ячеек, выбранных в настройках камеры |
| Количество ячеек с белым дымом | Минимальное количество ячеек с белым дымом для создания события или инцидента | Количество ячеек, выбранных в настройках камеры |
| Группа исключения областей наблюдения | ||
| Область наблюдения | Выпадающий список для выбора зоны, в которой будет отсутствовать отслеживание дыма и огня. Зона, в которой не будет происходить отслеживание дыма и огня. Событие не будет зафиксировано в этих зонах | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Камеры |
| Минимальный порог пересечения | Порог по пересечению области с детекцией, чтобы считать что данное пересечение - «Вхождение в область», т.е. порог пересечения области с детекцией для игнорирования события | 0.01…1.00 |
Результаты отслеживания дыма и огня в выбранной области наблюдения отображаются в карточке события или инцидента (Рисунок 81).
Цели использования с необходимыми параметрами обработчика приведены в Таблице 45.
Таблица 45. Описание целей использования обработчика «Отслеживание дыма и огня»
| Цель использования | Фиксируемый объект | Важные параметры для этой цели |
|---|---|---|
| Фиксация тревожных событий при обнаружении дыма и огня | Огонь, Черный дым, Белый дым | - Камера |
| - Область наблюдения | ||
| - Минимальный порог пересечения | ||
| Обнаружение огня/дыма на дороге | Огонь, Черный дым, Белый дым | - Ракурс (ближний/дальний) |
| - Периодичность отправки бестшотов | ||
| Обнаружение огня/дыма на открытом пространстве (парковки, перекрестки) | Огонь, Черный дым, Белый дым | - Область наблюдения |
| - Игнорирование определённых ячеек с объектами (например, светофор) |
Покадровый обработчик#
«Покадровый обработчик» необходим для обработки видеопотока при низкой скорости движения ТС (например, проезд через шлагбаум). Этот обработчик обрабатывает кадры видеопотока с заданным интервалом, что позволяет снизить нагрузку на систему при сохранении точности распознавания ГРЗ в зоне контроля (например, 1 кадр каждые X миллисекунд).
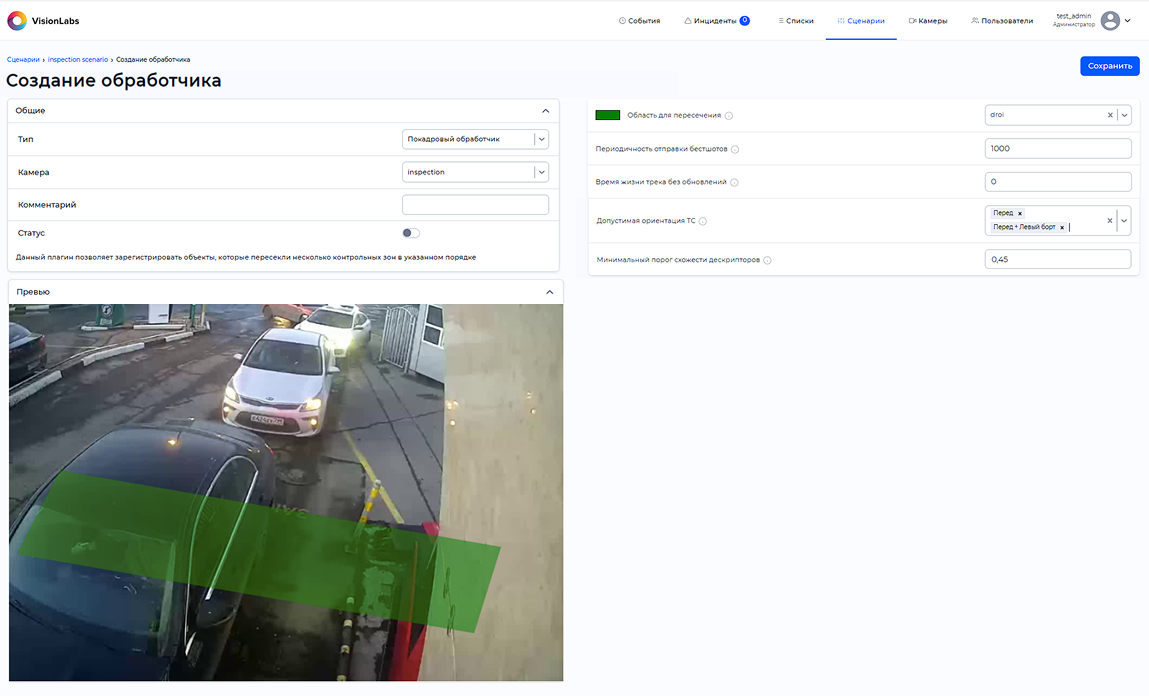
Настройка параметров выполняется в окне настройки обработчика после того, как тип обработчика будет установлен как «Покадровый обработчик» (Рисунок 82).
Параметры обработчика приведены в Таблице 46.
Таблица 46. Параметры обработчика «Покадровый обработчик»
| Название | Описание | Возможные значения |
|---|---|---|
| Общие | ||
| Тип | Выпадающий список с обработчиками, которые отвечают за детектирование и агрегацию информации для данного сценария | Доступные обработчики (подробнее в начале раздела Обработчики) |
| Камера | Камера, с которой будут получены кадры видеопотока для работы обработчика | Камеры, добавленные в систему |
| Комментарий | Комментарий пользователя | - |
| Статус | Значение активности обработчика | On/Off |
| Настройки камеры и зон распознавания | ||
| Область для пересечения | Выпадающий список для выбора зоны, при попадании ТС в которую выдается лучший кадр | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Камеры |
| Периодичность отправки бестшотов | Периодичность отправки лучших кадров по треку. Необходимо увеличивать паузу, чтобы ТС на кадрах было детектировано с разных ракурсов. Набор из лучших кадров трека позволяет повысить вероятность правильного распознавания атрибутов ТС | 0…60000 |
| - 0 – нет задержки | ||
| - 1…60000 – пауза в миллисекундах | ||
| Время жизни трека без обновлений | Время, в течение которого трек сохраняется без обновления с помощью лучших кадров. Это время указывает, сколько миллисекунд трек может оставаться без обновлений, прежде чем будет удален. Увеличение времени жизни может быть полезно, если трек ТС может быть временно перекрыт посторонним объектом | 0…10000 |
| - 0 – трек удаляется сразу после того, как не получен лучший кадр; | ||
| - 10000 – трек хранится на 10 секунд без обновлений | ||
| Допустимая ориентация ТС | Выпадающий список для выбора допустимой ориентации ТС. Для ТС будет выдан лучший кадр, если оценка ориентации ТС совпадет с одним из выбранных в списке значений | Вперед, Назад, Вперед налево, Вперед направо, Назад налево, Назад направо (можно выбрать сразу несколько вариантов) |
| Минимальный порог схожести дескрипторов | Для склейки бестшотов ТС в один трек может быть использован матчинг по дескриптору. Два бестшота ТС считаются одним треком, если пройден минимальный порог схожести дескрипторов при их матчинге | 0.01…1.00 |
| - 0.01 – минимальная схожесть, больше совпадений, но больше вероятность ошибок | ||
| - 1.00 – строгая проверка схожести, вероятность ошибок минимальна, но могут быть несколько треков на один ТС |
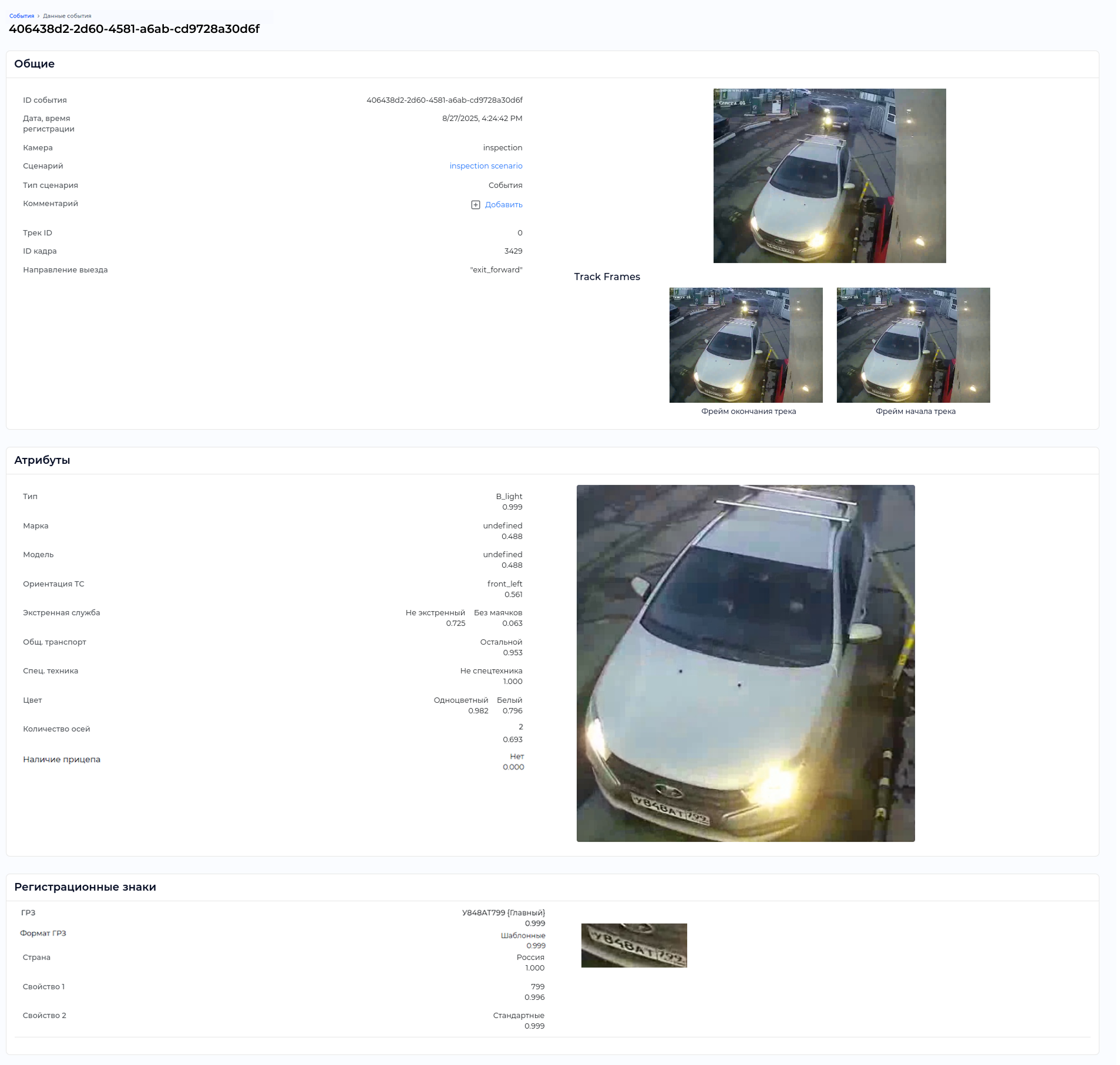
Результаты работы обработчика в выбранной области наблюдения отображаются в карточке события или инцидента (Рисунок 83).
Цели использования с необходимыми параметрами обработчика приведены в Таблице 47.
Таблица 47. Описание целей использования обработчика «Покадровый обработчик»
| Цель использования | Важные параметры для этой цели |
|---|---|
| Регистрация ТС при проезде через шлагбаум (фиксируемый объект: ТС) | - камера; |
| - область для пересечения | |
| - время жизни трека без обновлений | |
| - допустимая ориентация ТС | |
| - минимальный порог схожести дескрипторов | |
| Примечание: Событие фиксируется при проходе ТС через зону контроля |
Движение в зоне#
Обработчик «Движение в зоне» предназначен для отслеживания движения транспортных средств (ТС) в заданных областях. Этот обработчик комбинирует параметры разных обработчиков для более гибкой настройки, что позволяет эффективно использовать его в сценариях, связанных с трекингом ТС. Он может быть использован для регистрации каждой машины, попавшей в кадр, а также для мониторинга машин, пересекающих заданные зоны. Важной особенностью обработчика является учет ориентации и позиции ТС, что позволяет отслеживать либо только встречный либо попутный трафик.
Настройка параметров обработчика «Движение в зоне» выполняется в окне настройки обработчика после того, как тип обработчика будет установлен как «Движение в зоне» (Рисунок 84).
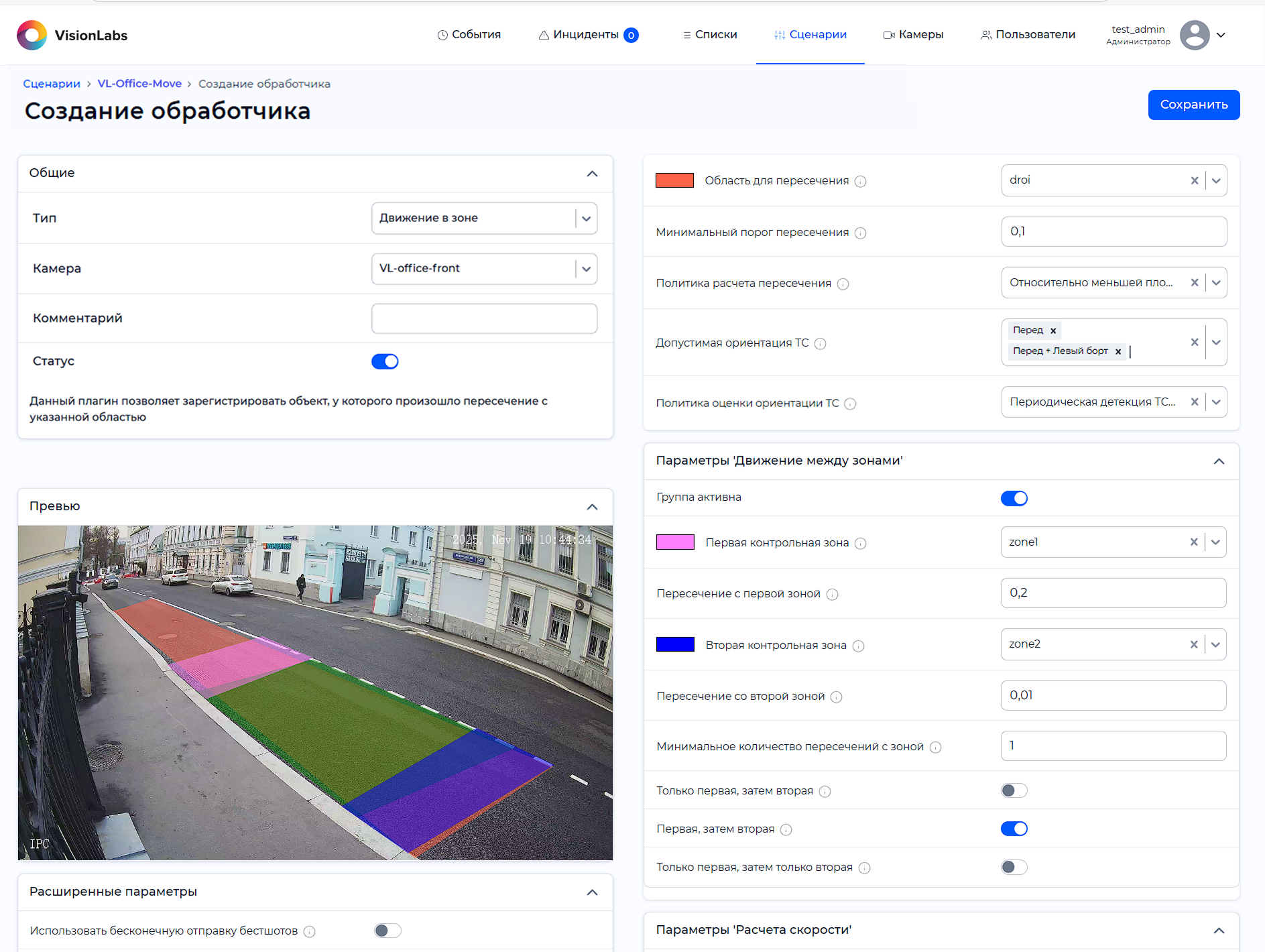
Параметры обработчика приведены в Таблице 48.
Таблица 48. Параметры обработчика «Движение в зоне»
| Название | Описание | Возможные значения |
|---|---|---|
| Общие | ||
| Тип | Выпадающий список с обработчиками, которые отвечают за детектирование и агрегацию информации для данного сценария | Доступные обработчики (подробнее в начале раздела Обработчики) |
| Камера | Камера, с которой будут получены кадры видеопотока для работы обработчика | Камеры, добавленные в систему |
| Комментарий | Комментарий пользователя | - |
| Статус | Значение активности обработчика | On/Off |
| Настройки камеры и зон распознавания | ||
| Область для пересечения | Выпадающий список для выбора зоны, при попадании ТС в которую выдается лучший кадр | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Камеры |
| Минимальный порог пересечения | Порог пересечения зоны и детекции ТС, при превышении которого система считает, что ТС находится в зоне. При превышении установленного порога система выдает лучший кадр | 0.01…1.00 |
| Политика расчёта пересечения | Выпадающий список, задающий, относительно какой площади считать процент пересечения ТС с выбранной зоной: зона (площадь пересечения/площадь зоны), детекция ТС (площадь пересечения/площадь позиционирования) или меньшая из площадей (площадь пересечения/min(площади зоны, площади позиционирования)) | - Относительно площади зоны; |
| - Относительно площади детекции; | ||
| - Относительно меньшей площади | ||
| Допустимая ориентация ТС | Выпадающий список для выбора допустимой ориентации ТС. Для ТС будет выдан лучший кадр, если оценка ориентации ТС совпадет с одним из выбранных в списке значений | Вперед, Назад, Вперед налево, Вперед направо, Назад налево, Назад направо (можно выбрать сразу несколько вариантов) |
| Политика оценки ориентации ТС | Алгоритм оценки ориентации ТС | - Периодическая детекция ТС в зоне — периодическая оценка ориентации ТС в зоне |
| - Первая детекция ТС в зоне — оценка ориентации ТС только для первой детекции | ||
| Параметры «Движение между зонами» | ||
| Группа активна | Значение активности данных настроек | On/Off |
| Первая контрольная зона | Выпадающий список для выбора зоны, в которой проверяется пересечение BBox ТС для фиксации начальной контрольной точки | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Камеры |
| Пересечение с первой зоной | Минимальный процент пересечения детекции с «Первой контрольной зоной», необходимый для формирования события/инцидента | 0.01…100 |
| Вторая контрольная зона | Выпадающий список для выбора зоны, в которой проверяется пересечение BBox ТС для фиксации начальной контрольной точки | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Камеры |
| Пересечение со второй зоной | Минимальный процент пересечения детекции со «Второй контрольной зоной», необходимый для формирования события/инцидента. При превышении установленного порога будет зафиксировано пересечение | 0.01…100 |
| Минимальное количество пересечений с зоной | Минимальное количество пересечений со «Второй контрольной зоной», необходимое для формирования события. Увеличение значения помогает уменьшить количество ложных событий | 1…48 |
| Только первая, затем вторая | Отправка лучших кадров происходит при детекции ТС в первой зоне, если оно не попало во вторую, а после — только при попадании во вторую зону, независимо от нахождения в первой. Этот режим подходит для объектов с большими габаритами, например, автобусов или грузовиков. В один момент времени может быть активировано только одно правило | On/Off |
| Первая, затем вторая | Отправка лучших кадров происходит при детекции ТС в первой зоне, вне зависимости от попадания во вторую зону, а затем — только при попадании во вторую зону. Этот режим подходит для объектов с большими габаритами, таких как автобусы и грузовики. В один момент времени может быть активировано только одно правило | On/Off |
| Только первая, затем только вторая | Отправка лучших кадров происходит только при раздельном проезде ТС первой зоны, а затем второй. Зоны должны быть расположены так, чтобы ТС не находилось в двух зонах одновременно. В один момент времени может быть активировано только одно правило | On/Off |
| Приоритет выбора детекций | Выбор алгоритма для отбора наилучших кадров | - Мин. расстояние до нижнего края – лучшей детекцией считается детекция, находящаяся ближе всего к нижней границе кадра; |
| - Мин. область детекции – лучшей детекцией считается детекция с минимальной площадью; | ||
| - Макс. область детекции – лучшей детекцией считается детекция с максимальной площадью; | ||
| - Мин. ID кадра – лучшей детекцией считается детекция с минимальным ID кадра, т.е. детекция при «входе» объекта в кадр; | ||
| - Макс. ID кадра – лучшей детекцией считается детекция с максимальным ID кадра, т.е. детекция при «выходе» объекта из кадра; | ||
| - Мин. пересечение – лучшей детекцией считается детекция с минимальной долей пересечения с областью для пересечения; | ||
| - Макс. пересечение – лучшей детекцией считается детекция с максимальной долей пересечения с областью для пересечения | ||
| Параметры «Расчет скорости» | ||
| Группа активна | Значение активности данных настроек | On/Off |
| Название | Название группы параметров расчета скорости | - |
| Начальная область | Выпадающий список для выбора зоны, в которой проверяются пересечения BBox ТС для фиксации начальной контрольной точки | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Камеры |
| Конечная область | Выпадающий список для выбора зоны, в которой проверяются пересечения BBox ТС для фиксации завершающей контрольной точки | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Камеры |
| Расстояние | Расстояние между Начальной и Конечной областями в метрах | 0.01…1000 |
| Область движения | Выпадающий список для выбора зоны детекции, в которой проверяются пересечения ТС. Введение дополнительной зоны позволит отсекать события, которые не требуется фиксировать | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Камеры |
| Порог области движения | Порог по пересечению области с детекцией, чтобы считать что данное пересечение - «Область движения», т.е. при превышении установленного порога будет сформировано событие/инцидент. Чем выше порог, тем точнее будет детекция ТС и ГРЗ, но количество пропусков также увеличится | 0.01…1.00 |
| Расширенные параметры | ||
| Использовать бесконечную отправку бестшотов | Включение функции отправки неограниченного количества bestshots (Параметры «Количество бестшотов» и «Максимальное количество бестшотов» не будут учитываться, а значение в пункте «Периодичность отправки бестшотов» должно быть больше 0) | On/Off |
| Количество бестшотов | Максимальное количество лучших кадров (бестшотов) ТС с ГРЗ, которое может быть выдано для трека ТС. Чем больше будет собрано лучших кадров, тем точнее будет выданная информация по атрибутам ТС. Увеличение количества бестшотов приводит к увеличению утилизации процессора | 1…N |
| - 1 – высокая вероятность получения неверных результатов распознавания | ||
| - N – время выбора лучшего кадра увеличивается, но качество выше | ||
| Максимальное количество бестшотов | Количество бестшотов – это максимальное количество ТС с ГРЗ. Максимальное количество бестшотов – это максимальное количество ТС с ГРЗ и без ГРЗ для одного трека. Максимальное количество бестшотов - (минус) Количество бестшотов = Максимальное количество бестшотов ТС без ГРЗ. Значение данного параметра должно быть больше или равно значению параметра «Количество бестшотов» | 1…10000 |
| - 1 – высокая вероятность получения неверных результатов распознавания из-за низкого качества лучшего кадра | ||
| - 10000 – время выбора лучшего кадра увеличивается, но качество выше | ||
| Задержка отправки первого бестшота | Пауза между началом трека и отправкой первого кадра в CARS_Stream для определения лучшего кадра. Необходимо увеличивать паузу, если ТС в первые секунды трека может быть не в оптимальном ракурсе | 0…10000 |
| - 0 – нет задержки | ||
| - 1…10000 – пауза в миллисекундах | ||
| Периодичность отправки бестшотов | Периодичность отправки лучших кадров по треку. Необходимо увеличивать паузу, чтобы ТС на кадрах было детектировано с разных ракурсов. Набор из лучших кадров трека позволяет повысить вероятность правильного распознавания атрибутов ТС | 0…60000 |
| - 0 – нет задержки | ||
| - 1…60000 – пауза в миллисекундах | ||
| Задержка на включение отправки по периодичности | Пауза перед переходом к режиму отправки бестшотов с заданной периодичностью. В течение этой паузы поиск бестшота выполняется на каждом кадре; после истечения — кадры отправляются с интервалом, указанным в «Периодичность отправки бестшотов». Параметр действует только если «Периодичность отправки бестшотов» > 0. | 0…10000 |
| - 0 – нет задержки | ||
| - 1…10000 – пауза в миллисекундах | ||
| Приоритет выбора детекций | Выбор алгоритма для отбора наилучших кадров | - Мин. расстояние до нижнего края – лучшей детекцией считается детекция, находящаяся ближе всего к нижней границе кадра; |
| - Мин. область детекции – лучшей детекцией считается детекция с минимальной площадью; | ||
| - Макс. область детекции – лучшей детекцией считается детекция с максимальной площадью; | ||
| - Мин. ID кадра – лучшей детекцией считается детекция с минимальным ID кадра, т.е. детекция при «входе» объекта в кадр; | ||
| - Макс. ID кадра – лучшей детекцией считается детекция с максимальным ID кадра, т.е. детекция при «выходе» объекта из кадра; | ||
| - Мин. пересечение – лучшей детекцией считается детекция с минимальной долей пересечения с областью для пересечения; | ||
| - Макс. пересечение – лучшей детекцией считается детекция с максимальной долей пересечения с областью для пересечения | ||
| Порог параметров | Минимальное количество распознанных атрибутов ТС (марка, модель, принадлежность к экстренной службе, спец. техника, общественный транспорт, тип ТС, страна, цвет) на одном лучшем кадре для срабатывания сценария. Необходимо увеличить порог для уменьшения количества ложных событий в системе | 0…10 |
| - 0 – все события/инциденты формируются, высокая вероятность появления ложных событий | ||
| - 10 – событие/инцидент формируется только при распознавании всех атрибутов ТС. Высокая вероятность пропусков событий | ||
| Порог детекций | Минимальное количество детекций ТС в рамках одного трека для сценария. Необходимо увеличить порог для уменьшения количества ложных событий | 0…10 |
| - 0 – отключение параметра | ||
| - 1 – Регистрация событий при получении 1 детекции. Высокая вероятность получения ложных событий | ||
| - 10 – Регистрация событий с минимум 10-ю детекциями. Высокая вероятность пропусков событий | ||
| Параметры области ГРЗ | ||
| Группа активна | Значение активности данных настроек | On/Off |
| Область ГРЗ | Выпадающий список для выбора зоны распознавания ГРЗ. Система распознает ГРЗ только в случае попадания BBox ГРЗ в данную зону | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Камеры |
| Порог области ГРЗ | Порог пересечения зоны и BBox ГРЗ, при превышении которого система считает, что ГРЗ находится в данной зоне | 0.01…1.00 |
| Параметры позиционирования ТС | ||
| Группа активна | Значение активности данных настроек | On/Off |
| Область позиции ТС | Выпадающий список для выбора зоны позиции ТС. ТС будет зарегистрировано только в случае пересечения позиции ТС с заданной зоной | Созданные зоны для выбранной камеры. Процесс создания зон распознавания описан в разделе Камеры |
| Политика определения позиции ТС | Выбор алгоритма оценки позиции ТС и проверки нахождения в зоне | - Периодическая детекция ТС в зоне — периодическая проверка пересечения позиции ТС и зоны |
| - Первая детекция ТС в зоне — проверка пересечения позиции ТС и зоны только для первой детекции | ||
| Порог пересечения позиции ТС | Порог по пересечению позиции ТС с заданной зоной. Для определения попадания ТС в зону рассчитывается процент попадания позиции ТС в зону. Если рассчитанный процент больше порога, то считается, что ТС находится в зоне, после чего оно регистрируется | 0.01…1.00 |
| Политика расчёта пересечения | Выпадающий список, задающий, относительно какой площади считать процент пересечения ТС с выбранной зоной: зона (площадь пересечения/площадь зоны), детекция ТС (площадь пересечения/площадь позиционирования) или меньшая из площадей (площадь пересечения/min(площади зоны, площади позиционирования)) | - Относительно площади зоны; |
| - Относительно площади детекции; | ||
| - Относительно меньшей площади |
Результаты работы обработчика в выбранной области наблюдения отображаются в карточке события или инцидента (Рисунок 85).
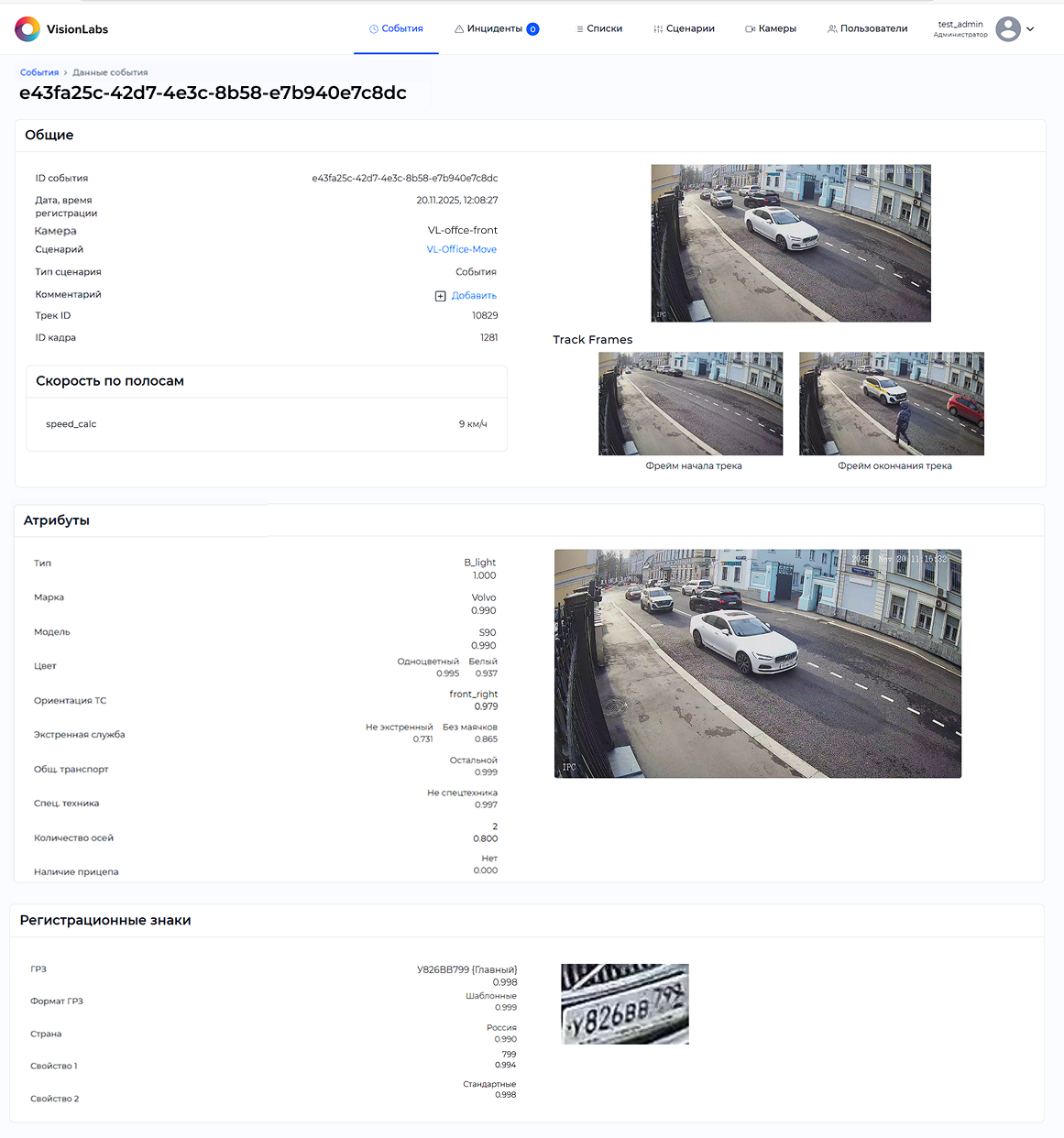
Цели использования с необходимыми параметрами обработчика приведены в Таблице 49.
Таблица 49. Описание целей использования обработчика «Движение в зоне»
| Цель использования | Фиксируемый объект | Важные параметры для этой цели |
|---|---|---|
| Журналирование проездов всех ТС на дороге или по полосам (поиск, анализ, учет и т. п.) | ТС | - камера |
| - область для пересечения | ||
| - минимальный порог пересечения | ||
| Примечание: Область для пересечения должна быть выбрана таким образом, чтобы ТС было видно полностью и без перекрытий | ||
| ГРЗ | - камера | |
| - область для пересечения | ||
| - минимальный порог пересечения | ||
| Определение направления движения – попутное, встречное, поворот, разворот ТС и ГРЗ | - камера | |
| - область для пересечения | ||
| - минимальный порог пересечения | ||
| - первая контрольная зона | ||
| - вторая контрольная зона | ||
| Примечание: Область для пересечения должна быть выбрана таким образом, чтобы ТС и ГРЗ было видно полностью на всем пути и без перекрытий (мост, туннели, строения) | ||
| Мониторинг скоростей ТС на заданной области (сбор, учет и анализ информации о скоростях ТС) | ТС | - камера |
| - область для пересечения | ||
| - минимальный порог пересечения | ||
| - начальная область | ||
| - конечная область | ||
| - расстояние между областями | ||
| Примечание: Область для пересечения должна быть выбрана таким образом, чтобы ТС было видно полностью и без перекрытий, а начальная и конечная области должны быть достаточной ширины для пересечения с геометрическим центром BBox ТС |
Саботаж#
Обработчик «Саботаж» предназначен для обнаружения смены ракурса/смещения камеры или её частичного/полного перекрытия. Это позволяет своевременно выявить попытки вмешательства в работу камер. В результате обнаружения будет сформирован инцидент с отображением начального и конечного кадра саботажа.
Чтобы обработчик «Саботаж» (Рисунок 86) сработал, необходимо создать обработчик «Саботаж» в сценариях типа «Инциденты».
Ограничения: - запрещено создание обработчика «Саботаж» в сценариях типа «События»; - запрещено изменение типа сценария с «Инциденты» на «События», если в нём присутствует обработчик «Саботаж».
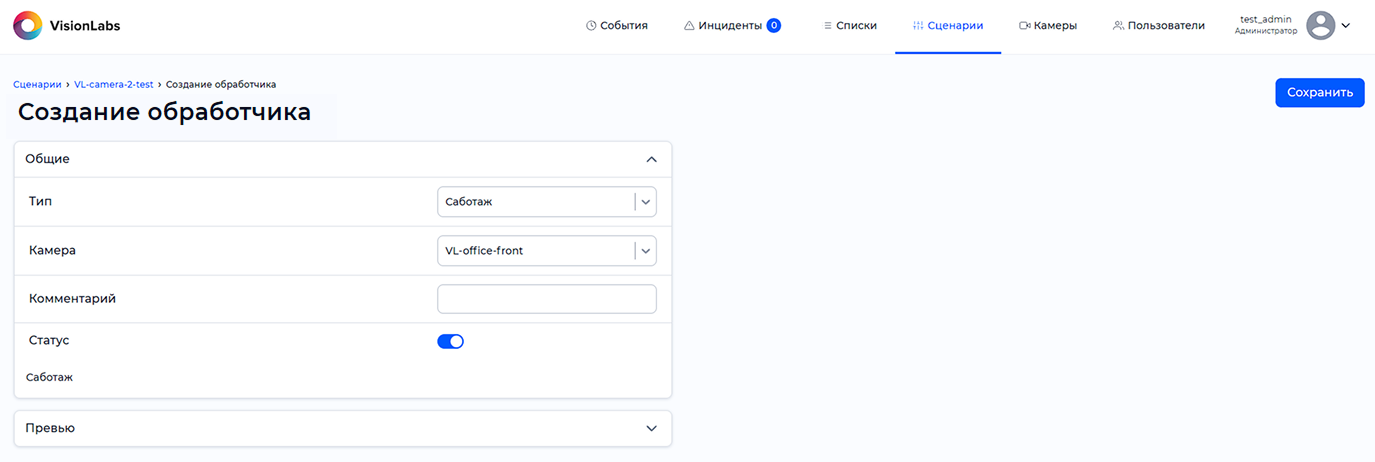
Параметры обработчика приведены в Таблице 50.
Таблица 50. Параметры обработчика «Саботаж»
| Название | Описание | Возможные значения |
|---|---|---|
| Общие | ||
| Тип | Выпадающий список с обработчиками, которые отвечают за детектирование и агрегацию информации для данного сценария | Доступные обработчики (подробнее в начале раздела Обработчики) |
| Камера | Камера, с которой будут получены кадры видеопотока для работы обработчика | Камеры, добавленные в систему |
| Комментарий | Комментарий пользователя | - |
| Статус | Значение активности обработчика | On/Off |
В результате обнаружения саботажа на вкладке «Камеры» отображается значок тревоги, указывающий на проблему (Рисунок 87).
При клике на иконку с восклицательным знаком происходит переход в раздел «Инциденты» с фильтрацией по сценарию и камере (Рисунок 88).
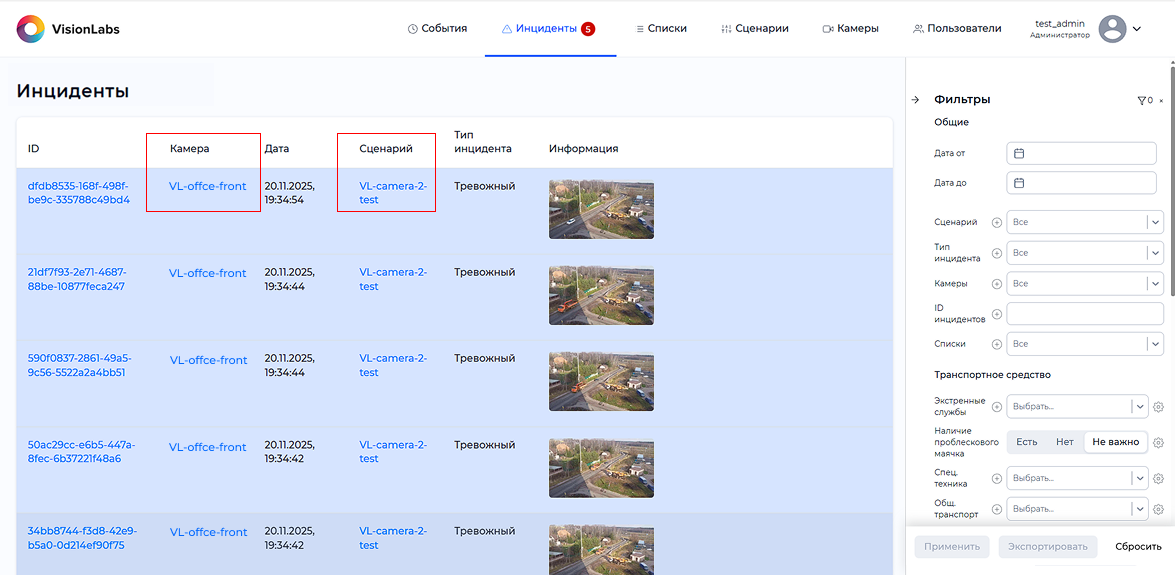
Результаты работы обработчика отображаются в карточке инцидента. В зависимости от ситуации, инцидент может быть связан с одним из типов саботажа.
Пример перекрытия камеры приведен ниже (Рисунок 89).
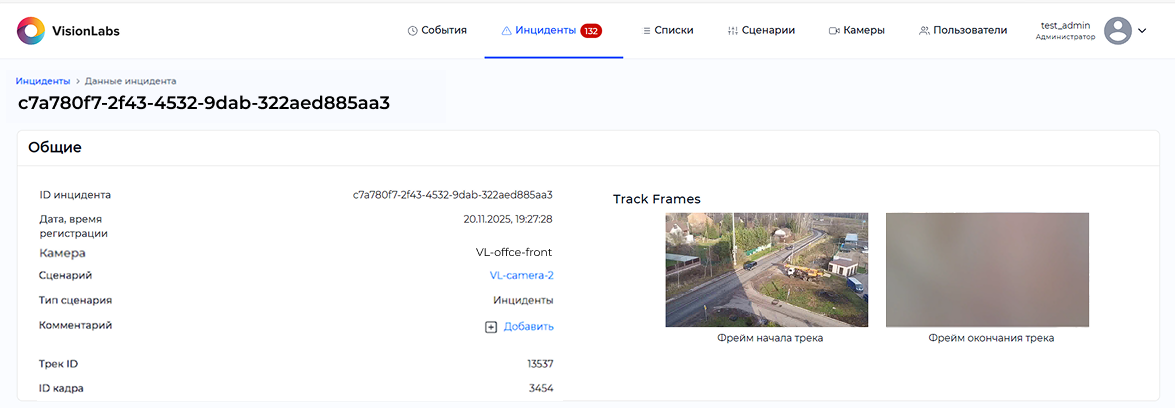
Пример смещения камеры приведен ниже (Рисунок 90).
Цели использования с необходимыми параметрами обработчика приведены в Таблице 51.
Таблица 51. Описание целей использования обработчика «Саботаж»
| Цель использования | Важные параметры для этой цели |
|---|---|
| Выявление изменений в области наблюдения: сдвиг и перекрытие объектива | - камера |